

Развитие и совершенствование промышленного производства (энергетики, транспорта, машиностроения, космической техники и т.д.) требует непрерывного увеличения производительности машин и агрегатов, повышения качества продукции, снижения себестоимости и, особенно в атомной энергетике, резкого повышения безопасности (ядерной, радиационной и т.д.) эксплуатации АЭС и ядерных установок[1].
Реализация поставленных целей невозможна без внедрения современных систем управления, включая как автоматизированные (с участием человека-оператора), так и автоматические (без участия человека-оператора) системы управления (СУ).
Управление – это совокупность действий, направленных на достижение поставленной цели.
Регулирование – частный случай управления техническими системами. Регулирование направлено на достижение объектом заданного состояния.
Объектом управления (регулирования) являются устройства, реализующие физические, химические, биологические и иные процессы, связанные с движением массы, энергии и информации. Управление объектом осуществляется посредством управляющего устройства. Применительно к техническим системам используются термины регулирующее устройство или регулятор.
Система – набор взаимодействующих элементов, обеспечивающих общий режим функционирования. Под элементом подразумевается любое техническое устройство, выполняющее назначенную функцию.
Управляющее устройство и объект управления образуют систему управления. Она называется разомкнутой, если сигнал передается в одном направлении, от управляющего устройства к объекту управления (см. Рис. 1).
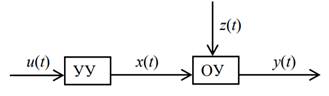
Рисунок 1 – Управление в разомкнутой системе
Система называется замкнутой, если сигнал передается не только от управляющего устройства к объекту управления, но и обратно, от объекта управления к управляющему устройству (см. Рис. 2).
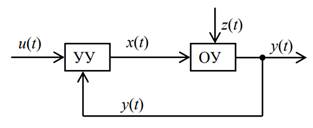
Рисунок 2 – Управление в замкнутой системе
В замкнутой системе различают соответственно канал прямой связи и канал обратной связи. Если устранить обратную связь, замкнутая система становится разомкнутой. Система управления (регулирования) характеризуется состоянием: значением всех параметров и показателей в данный момент времени. Параметром называют количественную характеристику, показателем – качественную.
Система автоматического управления (САУ) или система автоматического регулирования (САР) – это совместное действие управляющего устройства (регулятора) и объекта управления (регулирования).
Воздействия классифицируют на:
1. задающие - команды управляющему устройству (регулятору);
2. управляющие - изменяют параметры, определяющие состояние объекта;
3. возмущающие - случайные воздействия окружающей среды на объект управления.
На рисунке 3 представлена развернутая функциональная схема замкнутой САУ. Штриховыми линиями очерчено управляющее устройство.
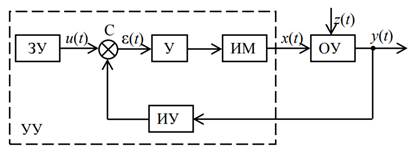
Рисунок 3 - Развернутая функциональная схема замкнутой САУ. Штриховыми линиями очерчено управляющее устройство.
На ней обозначены шесть элементов, выполняющие функции, необходимые для осуществления процесса автоматического управления.
1. Задающее устройство (ЗУ) – вырабатывает команды управляющему устройству (регулятору).
2. Сумматор (С) – устройство, алгебраически суммирующее сигналы, поступающие от задающего устройства и по каналу обратной связи. Затушеванный сектор означает, что сигнал обратной связи имеет знак, противоположный знаку сигнала от задающего устройства.
3. Усилитель (У) – устройство, усиливающее сигнал, поступающий от сумматора.
4. Исполнительный механизм (ИМ) – вырабатывает воздействие, способное изменить управляемый параметр объекта управления.
5. Объект управления (ОУ) – устройство, процесс в котором изменяют для достижения поставленной цели.
6. Измерительное устройство (ИУ) – регистрирует сигнал, свидетельствующий об изменении параметра объекта управления, преобразует его и посылает в сумматор. Взаимодействие элементов обеспечивается движением сигналов. Направление указывается стрелками.
Основными признаками деления автоматических систем на большие классы по характеру внутренних динамических процессов являются следующие:
1. системы стабилизации;
2. системы программного управления;
3. следящие системы.
Системы стабилизации применяются для поддержания постоянства управляемых величин различных объектов, например, напряжения генератора, угловой скорости вращения вала электродвигателя, температуры, давления в гермокамере и т. д.
Системы программного регулирования применяются для программного управления технологическими процессами, программного регулирования температуры, программного управления станками и т. п.
Следящие системы находят применение для управления, например, человеком-оператором, по приборам, положением вентиля крана, для управления положением РЛС ПУ.
Функционирование системы управления на каждом уровне описывается несколькими универсальными параметрами. Значение параметров для уровней, обеспечивающих внешнюю эффективность, зависит от характеристик изменения внешней среды. Для оперативного уровня параметры задаются целевыми установками более высоких уровней управления[2].
Известны следующие основные параметры системы[3]:
1. структура;
2. организованность;
3. связь;
4. состояние системы;
5. поведение системы.
На рисунке 4 представлены основные параметры систем управления.

Рисунок 4 - Основные параметры системы управления.
Структура – это совокупность элементов системы, а также устойчивых связей между ними, определяющая ее основные свойства. В общем виде структура включает в себя подсистемы, элементы, компоненты.
Организованность здесь рассматривается как внутренняя упорядоченность, согласованность взаимодействия частей системы, проявляющаяся в ограничении разнообразия их состояний в рамках системы.
Связь – это форма взаимных ограничений, накладываемых на поведение частей целого; при отсутствии ограничений связь тоже отсутствует.
Состояние системы – это известный вектор значений некоторых параметров, характеризующих систему в данный момент времени t, или статическая характеристика.
Поведение системы – это совокупность действий, изменений исследуемой системы, ее реакций на внешние воздействия, режимы жизнедеятельности. Поведение системы – это динамическая характеристика системы:
П = f(t, Q),
где Q – совокупность некоторых параметров, отобранных для анализа исследуемого объекта, необходимых и достаточных для его характеристики. Они влияют на устойчивость системы: если значения параметров выходят за рамки допустимого, то система рушится.