

Основные системы (рис. 1):
• бортовая вычислительная система в виде совокупности вычислительных средств и устройств сопряжения (адаптеров связи), обеспечивающая информационное взаимодействие с бортовыми
абонентами и предоставляющая свои вычислительные ресурсы для решения задач управления системами КА и задач контроля их работы;
• система управления движением и навигации или, в другой интерпретации, система ориентации и управления движением, предназначенная для управления движением КА как материальной точки (перемещением центра масс), так и для управления угловым движением КА (движением вокруг центра масс);
• система управления бортовой аппаратурой, выполняющая функции коммутации электропитания, усиления и преобразования электрических сигналов, а также выдачи команд управления в системы и приборы КА в соответствии с временными или логическими условиями;
• система бортовых измерений, предназначенная для сбора, обработки и передачи в НКУ телеметрической информации о результатах измерений, характеризующих состояние систем КА и протекающие на КА процессы;
• бортовая аппаратура служебного канала управления или командной радиолинии, представляющая собой радиотехнический комплекс для обеспечения своевременного обмена служебной информацией между НКУ и БКУ;
• объединенная двигательная установка, состоя-щая из комплекта двигателей для обеспечения перемещения КА относительно орбиты и угло¬вого движения КА;
• система обеспечения определенного теплового режима внутри КА;
• система энергоснабжения (СЭС) для преобразования первичной (солнечной) энергии в электрическую.[1]
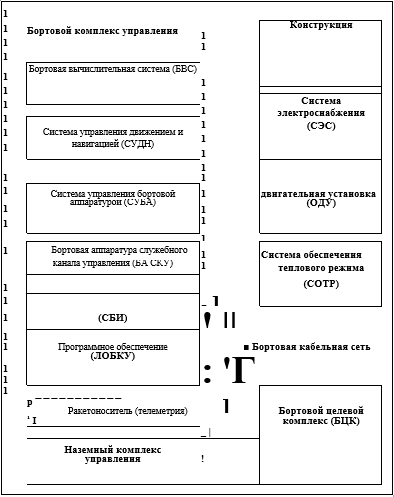
Рис. 1. Бортовые системы космического аппарата
Задачи управления вращающимися солнечны-ми батареями в некоторых типах КА решаются специальной системой ориентации солнечных батарей. В других КА эти задачи решаются в СУДН.
В некоторых классах КА в качестве отдельной структурной единицы рассматривается бортовая кабельная сеть.[5]
Внедрение на КА вычислительных средств и новых конструктивно-технологических решений, применение современной элементной базы и средств комплексирования ПО позволили создать основу для построения интегрированных БКУ. Возможность оперативного контроля состояния систем КА и “умного” выполнения программы полета КА с учетом внешней обстановки, текущего статуса бортовых систем и имеющихся на текущий момент времени ресурсов позволила перенести многообразные функции контроля и управления КА в БВС, точнее — в ее ПО. Тенденция концентрации этих функций в бортовой вычислительной системе (ПО БКУ) продолжает усиливаться по мере развития программных и аппаратных средств. Программное обеспечение сформировалось как
Отдельный (и одним из самых главных) компонентов БКУ (рис. 2).

Рис. 2. Структура программного обеспечения
Программное обеспечение БКУ построено по иерархическому принципу:
• первый или нижний уровень составляют драй-веры обмена с аппаратурой и программы организации вычислительного процесса;
• второй уровень составляют программы обеспечения управления и контроля работы бортовых приборов и оборудования;
• программы третьего уровня включают в себя программы обеспечения полетных режимов бортовых систем и расчетные программы;
• четвертый или верхний уровень составляют программы планирования и организации режимов работы всего БКУ и контроль состояния систем КА.
Архитектура ПО БКУ подразделяет все про-граммы на служебные (диспетчер, обмен, управление конфигурацией БВС, таймирование и др.) и функциональные (программы включения/выключения конкретных приборов, программы расчета различной подготовительной и сопроводительной информации, программы формирования управляющих воздействий на отдельные приборы и т. п.). Каждая программа (программный модуль) имеет свои настроечные параметры и логико-информационные связи с другими программами. Построение ПО БКУ предполагает детерминированное циркулирование обменной информации между программами всех уровней, причем управляющая информация поступает сверху вниз (от программ верхних уровней до программ нижних уровней), а контрольно-диагностическая информация — снизу вверх. Для обеспечения функционирования ПО БКУ в реальном масштабе времени каждой программе определяются последовательность и конкретное время подключения на вычислительном такте бортового компьютера, а также ее вычислительные ресурсы.[4]
Получение цифровой информации от бортовых систем (напрямую или через СБИ), обмен информацией с НКУ (через БА СКУ), обработка и использование полученной информации в расчетно-вычислительных задачах, реализованных в ПО, — все это выдвинуло БВС и ПО БКУ на главенствующее место в бортовом комплексе управления. Системы БА СКУ и СБИ в такой конфигурации являются неотъемлемой частью БКУ как источники циркулирующей на КА информации и необходимые звенья, поддерживающие информационно-логические интерфейсы. Заметим, что связи между БВС, БА СКУ и СБИ как физические (проводные, через бортовую кабельную сеть и устройства сопряжения), так и “виртуальные” (информационные, через каналы информационного обмена).
Неотъемлемой и основной частью БКУ следует считать и систему управления бортовой аппаратурой. Две важные функции СУБА носят интеграционный характер и являются прерогативой БКУ:
• обеспечение всех бортовых потребителей электропитанием;
• обеспечение физического (проводного) интерфейса с системами и оборудованием КА и управление ими путем формирования соответствующих команд и сигналов.
Все остальные из вышеперечисленных систем решают свои конкретные задачи, жизненно важные для КА, но не являющиеся интеграционными с точки зрения структурного построения БКУ. Из этих систем особо выделим СУДН, часто включаемую разработчиками КА в состав БКУ благодаря следующим аспектам:
• данная система (как и СУБА) — одна из первых бортовых систем, она проектировалась и разрабатывалась уже для первых КА;
• задачи СУДН (ориентация, стабилизация, наведение КА для решения целевых задач и т. д.) — важнейшие и первоочередные;
• программы управления СУДН тесно “привязаны” к программам управления других систем и программам “верхнего” уровня ПО БКУ и др. В состав СУДН включены чувствительные эле-менты в виде оптико-спектральных датчиков и датчиков угловых скоростей, преобразующие устройства и блоки формирования управляющих сигналов, а также исполнительные органы в виде силовых гироприборов (например, маховиков или гиродинов). Исполнительными органами СУДН служат также двигатели двигательной установки. Состав аппаратуры СУДН может дополняться навигационными приборами и аппаратурой спутниковой навигации.[3]
Следствием анализа требований и характеристик БЦК является подтверждение пригодности УКП к интеграции с данным БЦК в составе проектируемого КА либо определение перечня необходимых доработок и дооснащений УКП. Выбор окончательной модификации УКП применительно к новому БЦК определяется как решение многопараметрического функционала