

ВВЕДЕНИЕ
Автоматизация — это процесс применения технологий и систем для выполнения задач с минимальным участием человека. Основная цель автоматизации заключается в повышении эффективности функционирования, снижении затрат и минимизации ошибок, связанных с человеческим фактором, повышении надежности и точности.
В современном мире важно увеличение надежности, это позволяет выполнять задачи быстрее и более эффективно, что особенно важно в ситуациях, требующих срочного реагирования, таких как поисково-спасательные операции или мониторинг природных катастроф.
На сегодняшний день беспилотные летательные аппараты (БПЛА) становятся все более популярными и востребованными в различных областях, начиная от военной сферы и производственного мониторинга до гражданских приложений, таких как наблюдение за окружающей средой, поиск и спасение, агрокультура и даже развлечения, что показывает актуальность данной темы. Важным аспектом в работе любого БПЛА является обеспечение его стабильности, управляемости и надежности во время полета.
1 Описание функционирования БПЛА
Основной важной частью квадрокоптера является рама, на нее крепятся все компоненты. Форма и размер рамы оказывают значительное воздействие на аэродинамику, летные характеристики квадрокоптера, жесткость всей конструкции и распределение веса.
Следующим важный компонент – это аккумулятор. На сегодняшний день подавляющая часть БПЛА используют литий-полимерные (Li-Po) батареи. Такой выбор связан с рядом преимуществ Li-Po аккумуляторов – они имеют меньший вес, обладают хорошей емкостью, стабильно поддерживают выходное напряжение, обеспечивают высокую скорость зарядки по сравнению с их конкурентами - никель-кадмиевыми (Ni-Cd) и никель-металлогидридными (Ni-Mh) батареями.
Стабильность полета квадрокоптера полностью зависит от полетного контроллера. На нем установлены датчики, которые мгновенно регистрируют информацию о малейших изменениях углов ориентации квадрокоптера. Затем эти данные поступают в микропроцессор контроллера, который производит сложные математические расчеты и определяет, с какой скоростью должен крутиться каждый мотор в данный момент времени. После каждого расчета полученные сведения подаются на регуляторы оборотов (ESC) для исполнения. То, как ESC регуляторы взаимодействуют с двигателями, влияет на скорость и тягу дрона, а также его поведение в воздухе. Во время полета контроллер по протоколу специального интерфейса посылает данные, в которых содержится информация о необходимых действиях (увеличить или уменьшить обороты двигателей), регуляторам оборотов. Но так как двигатели являются трехфазными, то на них нельзя просто подать напряжение, требуется попеременно подавать напряжение на определенные участки обмотки. Данную работу осуществляют регуляторы оборотов. Основными датчиками являются: гироскоп, акселерометр, магнитометр, барометр и GPS. Структурная схема БПЛА представлена на рис. 1 [123].
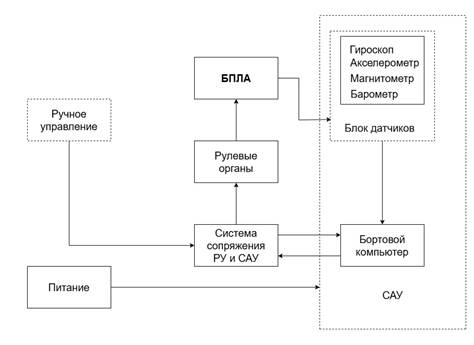
Рисунок 1 – Структурная схема БПЛА
Изменение высоты полета, маневрирование и изменение скорости полета квадрокоптера обеспечивает двигательная установка. Как правило, используют бесколлекторный тип двигателей. Данное решение обосновывается преимуществом бесколлекторных двигателей – они обладают большей надежностью, износоустойчивостью, имеют меньший вес и размер по сравнению с коллекторным типом [4].
2 Расчет надежности системы
Произведем расчет надежности системы управления на примере контура питания двигателей БПЛА типа квадрокоптер. Логическая схема расчета надежности представлена на рис. 2
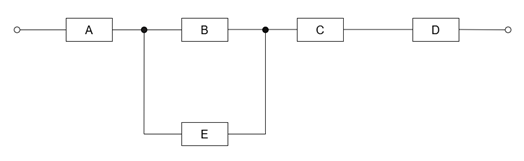
Рисунок 2 – Логическая схема расчета надежности системы. A – аккумулятор, B – жгут распределения питания, C – регулятор скорости, D – бесколлекторный двигатель, E – плата распределения питания.
Приведем значения интенсивности отказов элементов беспилотного летательного аппарата в таблице 1.
Таблица 1 – Интенсивность отказов элементов БПЛА
|
Обозначение |
Элемент |
Интенсивность отказов ( |
|
A |
Интенсивность отказов Li-Po аккумулятора |
|
|
B |
Интенсивность отказов клеммных соединений концов жгута распределения питания |
|
|
C |
Интенсивность отказов регулятора скорости |
|
|
D |
Интенсивность отказов бесколлекторного двигателя |
|
|
E |
Интенсивность отказов платы распределения питания |
|
 ),
), 





2.1 Расчет показателей надежности
Перед расчетами примем следующие допущения:
1. Все элементы прошли период приработки;
2. Отказы элементов независимы;
3. Справедлив экспоненциальный закон распределения.
Согласно приведённой выше схеме, ее вероятность безотказной работы будет выражаться формулой:


где  – интенсивность отказов элемента,
– интенсивность отказов элемента,  – индексы определенных элементов системы;
– индексы определенных элементов системы;  – время.
– время.
Построим график интенсивности отказов системы, предварительно рассчитав ее по формуле (расчёт производится в программе Matlab) [5,6]:

Ниже, на рис. 3, представлен код вычислений в программе Matlab.
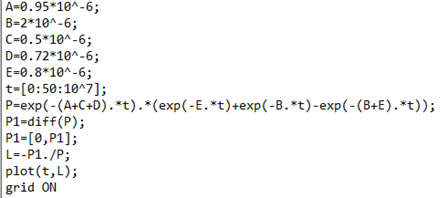
Рисунок 3 – код вычислений в программе Matlab
В результате получим график интенсивности отказов от времени, представленный на рис. 4.
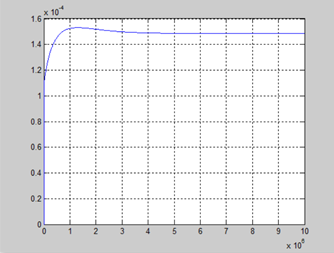
Рисунок 4 – График интенсивности отказов системы
2.2 Повышение надежности системы
Повышение надежности можно достичь с помощью следующих некоторых способов [7,8,9]:
1) Увеличение надежности элементов, использование устройств с более высокими показателями надежности.
2) Резервирование элементов системы.
3) Правильная эксплуатация системы.
4) Своевременное обслуживание системы.
Для повышения надежности рассматриваемой системы применим резервирование каждого элемента по отдельности. Соответственно схема примет вид, представленный на рис. 5.
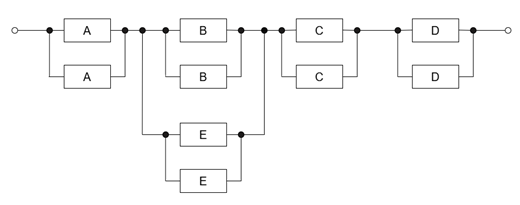
Рисунок 5 – Логическая схема расчета надежности для резервированной системы
И вероятность безотказной работы для каждого элемента будет иметь вид:

Тогда вероятность безотказной работы системы будет рассчитываться следующим образом:

Найдем интенсивность отказов данной системы с помощью программы Matlab:
Код с вычислениями для резервированной системы представлен на рис. 6.
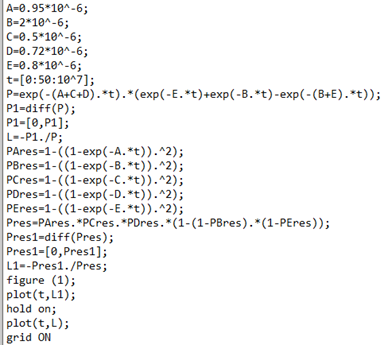
Рисунок 6 – код вычислений в программе Matlab
График интенсивности отказов для резервированной системы представлен на рис. 7.
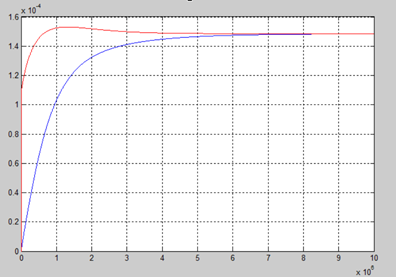
Рисунок 7 – График интенсивности отказов для резервированной системы
Определим изменения после внедрения резервирования в систему по формуле (1) и внесем результаты в таблицу 2.
Таблица 2 – Сравнение интенсивности отказов после резервирования системы
|
t, 105 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
|
|
0,0001525 |
0,0001519 |
0,0001498 |
0,000149 |
0,0001487 |
0,0001486 |
0,0001485 |
0,0001485 |
0,0001485 |
0,0001485 |
|
|
0,0001041 |
0,0001324 |
0,0001412 |
0,0001448 |
0,0001465 |
0,0001474 |
0,0001479 |
0,0001482 |
0,0001483 |
0,0001484 |
|
|
1,46 |
1,14 |
1,06 |
1,03 |
1,015 |
1,008 |
1,004 |
1,002 |
1,001 |
1,0006 |



Из данных Таблицы 2 видно, что резервирование системы позволяет снизить интенсивность отказов в начале эксплуатации практически в 1,5 раза.
ЗАКЛЮЧЕНИЕ
В работе была рассмотрена система функционирования беспилотного летательного аппарата типа квадрокоптер, для контура питания двигателей БПЛА произведен расчет вероятности безотказной работы и интенсивности отказов. Также были построены графики интенсивности отказов для системы с резервированием и без.
Анализ данных графиков показал, что после резервирования системы интенсивность отказов системы становится значительно меньше. Полученные результаты позволяют говорить o применимости подобной методики настройки и тестирования программно-технического комплекса различной степени сложности.
Библиографическая ссылка
Танаев О.А., Астапов В.Н. ПРОЕКТНЫЙ РАСЧЁТ НАДЁЖНОСТИ СИСТЕМЫ УПРАВЛЕНИЯ БПЛА // Международный студенческий научный вестник. 2024. № 6. ;URL: https://eduherald.ru/ru/article/view?id=21645 (дата обращения: 09.04.2025).
DOI: https://doi.org/10.17513/msnv.21645