

Введение
В настоящее время всё больше и больше зон оборудуется под отдых и чаще всего в таких зонах высаживают газон. Однако за газоном постоянно нужно ухаживать, для этого существуют газонокосилки. На рынке представлен огромный выбор различных моделей этих устройств. Существуют газонокосилки, которые работают на аккумуляторе и могут сами ездить, однако они не могут автоматически косить и требуют вмешательства человека, также газонокосилки потребляют электрическую энергию или бензин, что не экологично, мы решили сразу устранить две проблемы: первая - автоматизировать стрижку газона, вторая - использовать экологичный топливный элемент на основе биотопливного элемента, который будет употреблять в качестве топлива траву, то есть создать автоматизированную газонокосилку.
В процессе разработки автоматизированной газонокосилки важную роль играет автоматизированная система управления, так как в настоящее время автоматизированной газонокосилки существуют только в виде разработок, то в качестве аналога рассмотрим систему управления робота - пылесоса.
В данной работе содержится информация существующих газонокосилках, их характеристики и принципы работы. Так же рассмотрены существующие роботы-пылесосы и их алгоритмы работы.
Цель нашей работы создать проект автоматизированной газонокосилки с системой управления, разработанной на основе работы алгоритма робота-пылесоса и самоходной газонокосилки на аккумуляторе.
1. Классификация газонокосилок
Газонокосилками называются устройства, предназначенные для поддержания газона в хорошем состоянии. Газонокосилки имеют разнообразные конструкции, зависящие от типа двигателя, потребляемого вида энергии, способа скоса травы и дополнительных опций, однако имеются и общие конструкционные детали: корпус, режущий винт, колеса, контейнер для скошенной травы, рукоять. Можно выделить несколько групп газонокосилок: Бензиновые, механические, электрические, аккумуляторные и автоматизированные газонокосилки.
Бензиновые газонокосилки используют в качестве источника энергии бензин. Они позволяют обрабатывать большие площади довольно качественно и эффективно с точки зрения человеческих затрат. Такие газонокосилки имеют бензиновый двигатель, вращающий резцы, колёса, корпус, некоторые имеют контейнер или бак для скошенной травы и рукоять для управления. Данную группу газонокосилок можно разделить по мощности на подгруппы: малой, средней и высокой производительности. Управление газонокосилками малой и средней мощностей осуществляется исключительно усилиями оператора, в то время как высокой мощности зачастую делают самоходными для облегчения управления ввиду их большой массы.
Механические газонокосилки работают благодаря мускульным усилиям человека, которые передаются колесам, а те вращают режущий винт. Такие газонокосилки довольно дешевые, однако они не могут обеспечить качественную обработку большой площади газона.
Электрические газонокосилки используют в качестве энергии электричество, подводимое напрямую по проводу. Данные газонокосилки обладают достаточной мощностью, могут быть как самоходными, так и нет, по конструкции очень схожи с бензиновыми и аккумуляторными, за тем исключением, что от первых кардинально отличаются силовой установкой и наличием управления распределением энергии. Такой тип газонокосилок является экологически чистым, что играет немаловажную роль в наше время.
Аккумуляторные газонокосилки очень похожи на электрические, отличает их лишь наличие автономного источника энергии - аккумуляторной батареи. Они весьма мобильные и удобные, как бензиновые, однако их недостатком является вынужденные перерывы на восполнение заряда батареи.
Автоматизированные газонокосилки в наше время являются наиболее перспективным направлением развития. Такая газонокосилка будет внешне напоминать аккумуляторную, однако с тем лишь отличием, что сможет самостоятельно передвигаться по газону и выполнять работу за человека-оператора. Она будет способна «Видеть» препятствия и рельеф, записывать свой маршрут и автоматически возвращаться на док-станцию.
Основными критериями выбора газонокосилок являются тип участка для скашивания, его расположение, площадь, кто будет оператором. Эти критерии влияют на наличие контейнера для сбора скошенной травы, мощность, автономность (опционально), регулировку высоты скоса травы, наличие ведущих колес, простота в управлении.
Остановимся подробнее на аккумуляторной газонокосилке, поскольку Автоматизированная газонокосилка строится на ее основе. Рассмотрим схему аккумуляторной газонокосилки
2. Достоинства и недостатки аккумуляторных газонокосилки перед бензиновыми
Бензиновые газонокосилки весьма шумные и загрязняют атмосферу, в то время как аккумуляторные тихие и экологичные. Несомненно, аккумуляторные газонокосилки не подойдут для обработки очень больших площадей ввиду их недолгой автономности, однако для небольшого хозяйства это наиболее сбалансированный вариант.
Кроме того, аккумуляторные газонокосилки значительно проще в обслуживании, им не нужно заливать расходные жидкости, такие как масло, топливо, они легче, проще в управлении, однако покупка экологичной газонокосилки обойдется дороже бензиновой, кроме того, есть опасность залива водой или иными жидкостями схем электронной начинки газонокосилки.
3. Описание робота-пылесоса
Чтобы разработать алгоритмы для автоматизированной газонокосилки, рассмотрим робот-пылесос, его строение, алгоритмы, так как его схема управления наиболее приближенная к схеме управления автоматизированной газонокосилки.
Роботы-пылесосы обычно имеют небольшой размер корпуса, аккумулятор, различные датчики, блок управления. Рассмотрим ниже подробнее каждый из элементов.
Аккумулятор. Это основной источник питания робота-пылесоса, в настоящее время наиболее распространены LiLon и NiMh батареи, однако наиболее популярным является LiLon, около 73%. Это обусловлено их быстрой зарядкой, большей емкостью и меньшей степенью саморазрядки, по сравнению с NiMh.
Датчики – это органы чувств для робота-пылесоса. Существует множество датчиков, но в основном используются следующие: Инфракрасные датчики расстояния, механические датчики столкновения, гироскоп, компас, датчик уровня заряда батареи, датчик заполнения контейнера с отходами, датчик поверхности, в некоторых устанавливается микрофон и камера, для лучшего взаимодействия с окружающей обстановкой и восприятия голосовых команд, а также другие датчики. Данные, полученные с датчиков, поступают в «Мозг» робота и там обрабатываются.
Блок управления, или «мозг робота-пылесоса». Сюда поступают все данные, полученные роботом, или заданные пользователем. Совокупность микросхем и программных схем позволяют роботу выполнять различные действия, такие как построение карты помещения и ориентироваться по ней, передвигаться, анализировать и избегать препятствия, убираться по расписанию, предоставлять отчет пользователю, взаимодействовать с иными системами и т.д. Зачастую робот-пылесос оснащен несколькими режимами уборки, от 4 до 8. Одна из главных задач робота — это навигация в заданной области. Существует несколько основных способов навигации: изменение маршрута при столкновении или обнаружении препятствий, навигация с помощью построения карты помещений. Последнюю имеют около 48% моделей роботов-пылесосов.
Помимо электронной начинки, в роботе также присутствуют механические части- щетки, колеса, электроприводы, контейнер для отходов.
4. Алгоритмы работы роботов-пылесосов, как аналог системы управления роботом-газонокосилкой
При построении маршрута и движения роботы-пылесосы могут использовать различные алгоритмы движения, которые основываются на данных измерительных приборов. Ниже приведены некоторые из используемых алгоритмов.
Если во время передвижения (Рисунок 1) робот-пылесос обнаруживает препятствие то он выполняет поворот для обхода препятствия. Во время поворота датчик угла поворота измеряет угол поворота корпуса и сравнивает его с контрольным углом поворота, если измеренный угол поворота не превышает контрольный, то движение возобновляется, в противном случае робот останавливается и сообщает о выходе из строя датчика препятствий [1].
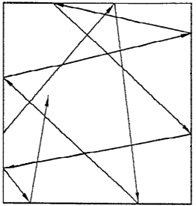
Рисунок 1 – пример передвижения
Если при движении по спирали (рисунок 2) робот-пылесос обнаруживает препятствие, то он отъезжает назад на заданное расстояние и продолжает движение по спирали [4].
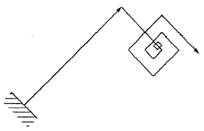
Рисунок 2 – движение по спирали
При движении по заданному маршруту может использоваться приведенный ниже алгоритм. Перед началом движения изначальное местоположение заносится в память, рассчитывается траектория движения и происходит инициализация начала движения. Через определенные промежутки времени происходит сверка текущего положения с рассчитанным и при необходимости вносятся корректировки в ход движения [5,3].
5. Автоматизированные газонокосилки
Автоматизированные газонокосилки — это самостоятельные роботы-газонокосилки, которые могут самостоятельно определить время начала и конца работы, объем обрабатываемой площади и затрачиваемое время, возвращаться на место зарядки. Все эти действия выполняются на основе заданных пользователем первоначальных данных: границы обрабатываемой площади, время начала и конца, интенсивность. При этом важно, чтобы качество и эффективность обработки была не хуже, чем если бы она выполнялась с участием человека.
Внешняя конструкция газонокосилки с автоматическим управлением похожа на аккумуляторную: важные элементы электросхемы управления, механизмы и датчики помещены в корпус для их защиты от воздействия окружающей среды, механических повреждений, воды. Также в корпус помещаются электроприводы, аккумулятор, режущие ножи.
Такие газонокосилки часто используют несколько электроприводов: одни отвечают за колеса, другие за вращающийся клинок для скоса травы. Это обеспечивает сбалансированную производительность и мощность техники.
Управление всеми элементами автоматизированной газонокосилки осуществляется ее «мозгом»- центральной системой управления. Она включает в себя программное обеспечение, которое содержит алгоритмы работы, модули ввода и вывода информации для пользователя. Некоторые модели имеют систему защиты от несанкционированного доступа и блокировку режущих элементов, для предотвращения несчастных случаев.
«Каналами общения» для робота служат различные сенсоры и датчики. Самыми распространенными являются инфракрасные датчики, лазерные дальномеры, камеры, электронные компасы и гироскопы, специальные маяки, устанавливаемые пользователем, GPS модуль, записываемая карта области и отслеживание перемещений по ней.
Что касается передвижения газонокосилки, то в основном ведущими колесами являются задние, с независимыми электромоторами, однако бывают и полноприводные модели. Чтобы совершить маневр, ведущим колесам задается различная скорость или различное направление вращения. Разработчики стараются уменьшить время поворота и ширину поворотной полосы, чтобы уменьшить бесполезную работу и, как следствие, пустые энергозатраты.
Такие автоматизированные газонокосилки малогабаритные, маневренные, самостоятельные, достаточно тихие, качественно выполняющие свою работу, что делает их идеальными кандидатами для работы на приусадебных участках, частных парковых зонах, газонах перед домами или офисными зданиями с огороженной территорией.
6. Алгоритмы работы автоматизированной газонокосилки
Цель алгоритма работы для автоматизированной газонокосилки - описать работу и движение агрегата, его реакции на внештатные ситуации.
Алгоритм движения описывает по какому маршруту и каким образом будет двигаться машина с целью обработать участок наиболее полно и эффективно. автоматизированные газонокосилки двигаются циклично, повторяя определенные действия.
Можно выделить три группы способов движения:
1. Гоновые
2. Диагональные
3. Круговые
Первая группа описывает движение вдоль одной из сторон участка, то есть робот двигается по прямой, затем разворачивается, и снова двигается по прямой. Данный способ эффективен для маневренных агрегатов, обрабатывающих участок прямоугольной формы. Вторая – движение осуществляется под острым или тупым углом к сторонам участка. Третья – повторяются контуры участка при таком способе газонокосилка может гораздо быстрее скосить траву, количество холостых ходов и работы винтов без полезной нагрузки минимально. Также движение может быть хаотичным, однако оно малоэффективно. Единственным преимуществом хаотичного движения можно выделить равномерность подстригания газона, без наличия «Швов» подстригания, но существенный минус - большие затраты ресурсов и времени [6].
Рассмотрим пример алгоритма для автоматизированной газонокосилки Работой программы управляют две основные петли: петля, которая запускается сигналом прерывания и основная петля [2].
Первая петля, запускаемая сигналом прерывания, который генерируется каждые 4мкс аппаратными средствами микропроцессора. Данная петля позволяет определять по отдельности приращения показаний спидометра двух ведущих колес, проверять сторожевое устройство, анализировать сигналы датчиков столкновений и корректировать часы и выдержки времени, которые должны быть использованы основной петлей.
Основная петля, которая инициирует сбор данных об окружающих условиях каждые 100 мс и которая в зависимости от результатов анализа внешних параметров управляет следующими операциями: резка, маневрирование, остановка из-за слабой освещенности, остановка из-за мокрой травы, остановка из-за подзарядки, тревога.
Энергия с питающего устройства, в данном случае с микробного топливного элемента, будет поступать в аккумулятор, после чего на управляющую плату и все остальные необходимые элементы: датчики, GPS модуль, процессор, колёса, винт. (Рисунок3).
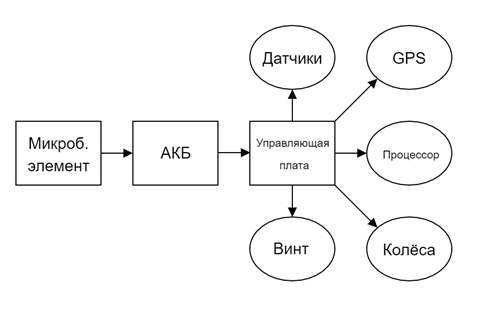
Рисунок 3 – распределение энергии в газонокосилке
Управляющие команды будут поступать от процессора на управляющую плату, а процессор, в свою очередь, будет взаимодействовать с датчиками, такими как GPS модуль, инфракрасные датчики и другие. Через управляющую плату команды будут поступать на необходимые элементы схемы, такие как двигатели, винт (рисунок 4).
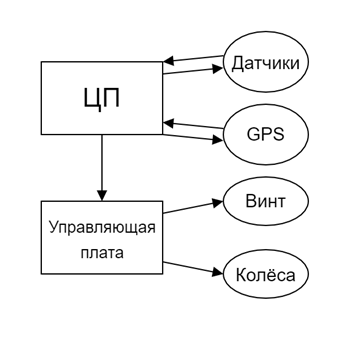
Рисунок 4 – управление автоматизированной газонокосилкой
7. Биотопливный элемент
Еще недавно получение энергии из биомассы считали фантастикой, но уже сейчас развитие технологий позволяют получать энергию на основе переработки биомассы.
Биотопливные элементы могут работать дольше, чем гальванические элементы и аккумуляторы, а также имеют улучшенные характеристики. В качестве источника топлива могут быть использованы различные биомассы, такие как целлюлоза, крахмал, древесные порошки, полиоды. Стоит отметить, что древесная биомасса занимает порядка 80% среди всех биомасс. Использование жидких катализаторов взамен катализаторов из благородных металлов обеспечивает их высокую устойчивость к различным примесям, как органического, так и неорганического происхождения, а также низкую стоимость. По сравнению с ископаемыми видами топлива, биотопливо имеет ключевые преимущества: оно экологично, занимает шестое место среди известных источников энергии: горючие сланцы, уран, уголь, нефть, природный газ, пятое по производительности, после солнечной, ветряной, гидро и геотермальной энергии, оно возобновляемо, имеет малое количество выделяемых в окружающую среду парниковых газов. Использование этого вида топлива также помогает решить проблему утилизации крупногабаритных отходов, например с сельскохозяйственных полей, твердые бытовые отходы, что ведет к улучшению экологической обстановки в стране. В России ежегодно накапливается до 270 млн. тонн сухих органических отходов, из которых 230 млн. тонн составляют сельскохозяйственные.
8. Преимущества внедрения роботизированных газонокосилок на биотопливном элементе
Несмотря на дороговизну реализации роботизированных газонокосилок на биотопливном элементе, они являются новым этапом в развитии данной отрасли. Такие модели отлично бы подошли для стрижки газона в городских парках и скверах, на стадионах или даже на частных участках. Во время обработки газона на участках большой площади возникает множество проблем, которые автоматизированная газонокосилка может с лёгкостью решить. Во-первых, во данного процесса приходится задействовать тысячи людей, которых можно было бы использовать в других областях. Автоматизированная газонокосилка заменяет их всех, работая автономно. Помимо этого, возникает проблема большого расхода электроэнергии в случае электрических газонокосилок и бензина в бензиновых. У автоматизированной газонокосилки нет подобных недостатков, так как она работает на сырье, которое получает прямо во время работы. Это так же решает ещё одну проблему – вывоза и утилизации отходов, то есть скошенной травы. Чаще всего её даже не вывозят, а оставляют неподалёку от места стрижки, что влечёт её дальнейшее гниение и порчу газона. В автоматизированной газонокосилке на биотопливном элементе скошенная трава сразу перерабатывается в электроэнергию для питания оной.
Заключение
В данной статье проведен аналитический обзор существующих газонокосилок: электрических, бензиновых, аккумуляторных. Данный обзор проводился для обоснования разработки робота-газонокосилки. Для решения поставленной задачи был произведен поиск конструкций аналогов роботу - газонокосилки. Практически полным аналогом, в системе управления и алгоритмов работы, был рассмотрен робот-пылесос. Изучение алгоритмов и схем управления робота – пылесоса позволит сократить время и финансовые затраты на разработку робота-газонокосилки. Также можно заимствовать систему навигации, тактильные, инфракрасные и другие интеллектуальные датчики, которые используются в роботе-пылесосе
Интеллектуальная система управления робота - газонокосилки потребует разработки дополнительных датчиков, таких как контроль степени освещенности, контроль влажности травы, так и дополнительных узлов и механизмов, необходимых для внедрения топливных элементов.
Библиографическая ссылка
Ельков С.А., Осмаков Н.А. РОБОТ-ГАЗОНОКОСИЛКА НА БИОТОПЛИВНОМ ЭЛЕМЕНТЕ // Международный студенческий научный вестник. 2021. № 1. ;URL: https://eduherald.ru/ru/article/view?id=20344 (дата обращения: 06.04.2025).