

Введение. Изучение динамики человека и движений в частности очень важно для предотвращения травм и лучшего понимания поведения человека. Решение задачи предсказания движений человека все еще не доработано до конца с точки зрения скорости вычислений и реалистичности результатов. В действительности, существует большое число правил и факторов, влияющих на движения человека, из-за чего создание и работа модели становятся очень медленными. Хотя ИНС очень подробно изучаются в последнее время и применяются в очень широком круге задач, преимущества их использования в моделях движения все еще не были изучены [1].
В целом, хотя и ИНС довольно часто используются в исследованиях различных аспектов движения человека, в настоящее время не существует примеров использования ИНС для непосредственного управления углами суставов полной модели человека с большим числом степеней свободы. В данной статье предлагается изучить возможности использования ИНС для предсказания движений не упрощенной модели человека, а полной модели с 55-ю степенями свободы [2].
В качестве нейронной сети будет использоваться сеть обобщенной регрессии (СОР) для предсказания движений в двух действиях:
- ходьба вперед с рюкзаком
- запрыгивание на ящик
Процесс обучения. Предсказание движений будет предсказываться на основе выполняемого действия. Входные параметры зависят от введенных пользователем данных [3]. Во время обучения и тестирования параметры сети и ширина Гауссиана определяются так, чтобы сеть достигла наилучших результатов.
Обучение сети должно выполняться с использованием экспериментальных данных. Однако сбор таких данных может быть очень трудоемким и дорогостоящим процессом, особенно в случае, когда нужно учесть различные действия и вариации в антропометрии субъекта. Более того, некоторые данные, вроде момента силы в суставе, могут быть труднодоступными.
В итоге генерируется большая обучающая выборка для разных комбинаций входных параметров, с помощью которой можно обучить сеть с разными входными параметрами. Скорость вычислений является одной из проблем, которую потенциально могут решить СОР [4].
Ходьба вперед. Первое действие – это ходьба вперед с рюкзаком. Это действие было предложено по следующим причинам:
- Для проверки способности СОР выполнять предсказания для действия с относительно большим числом входов и выходов, а также большой обучающей выборкой
- Для проверки способности СОР работать с выходами двух разных типов
- Задача о ходьбе является одной из самых распространенных при изучении движений человека
- Задача о ходьбе уже была достаточно подробно изучена, успешно предсказывается, а результаты были проверены техникой захвата движения.
Входными параметрами сети для задачи о ходьбе были приняты следующие переменные:
- Скорость движения
- Вес рюкзака
- Четыре длины, описывающие нижнюю часть тела (от позвоночника до бедра, от бедра до колена, от колена до лодыжки, от лодыжки до ступни)
- Три интервала допустимых значений углов суставов (верхние и нижние границы). Включают в себя верхние и нижние границы для сгибания и разгибания бедра, колена и лодыжки. Выбраны именно эти углы, поскольку их изменение оказывает сильное влияние на результат.
В задаче о ходьбе есть много входных параметров, которые могут быть использованы как входы ИНС и которые можно свободно изменять [5].
Обучающие значения используют различный вес рюкзака, но в визуально рюкзак отображаться не будет. Наличие рюкзака, однако, отразится на угле изгиба позвоночника. Третье значение веса рюкзака в таблице соответствует максимальному весу, который может нести средний человек. Три значения длин выбраны, на основе средних значений для мужчины, женщины и среднего для обоих полов. Наконец, предельные углы, верхний предел и нижний, выбраны так, что первое значение соответствует среднему для мужчины, а второе и третье выбраны случайно, так, чтобы сузить интервал.
Запрыгивание на ящик. Вторая рассмотренная в этой статье задача проверяет способность СОР выполнять предсказания движений при запрыгивании на ящик. Процесс запрыгивания можно увидеть на Рис. 1. Это действие было предложено по следующим причинам [6]:
- Для проверки способности СОР предсказывать движения в действии, в котором ступни и руки должны быть расположены в определенных местах (дотрагиваться их).
- Это действие является довольно сложным, имеет множество правил и требует выполнения предсказаний с большой точностью.
- Для проверки предсказания сил реакции опоры на обеих ступнях вместе с контрольными точками суставов в качестве выходов одной и той же сети.
Значения моментов сил в суставах не включены в данную задачу т.к. требуется изучить возможность одновременной работы сети с разными типами выходных данных. В данной задаче, предсказание сил реакции опоры важнее, чем предсказание моментов сил в суставе [7].
Используются те же длины, что и для предыдущего действия:
- От позвоночника до бедра
- От бедра до колена
- От колена до лодыжки
- От лодыжки до ступни
В задаче о ходьбе, при запрыгивании на ящик имеется два типа выходных данных: контрольные точки суставов и силы реакции опоры для обеих ступней. Особое значение имеют максимальные значения сил.

Рис. 1. Процесс запрыгивания на ящик.
Чаще всего исследователей интересуют максимальный или пиковый сегмент или регион графика сил для каждой ступни [8]. Более того, для правой ступни большую часть времени сила реакции опоры равна 0, поскольку она не контактирует ни с какой поверхностью во время выполнения действия (Рис. 2).
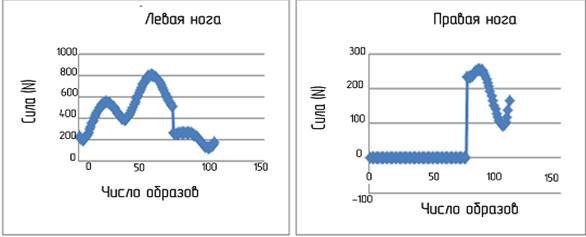
Рис. 2. Примеры графиков сил реакции опоры обеих ступней для одного из элементов обучающей выборки.
В связи с этим, чтобы уменьшить число выходов, из файлов обучения извлекается 20 максимальных значений силы для каждой ступни (Рис. 3) и сеть тренируется так, чтобы предсказать их вместе с другими выходами.
У графиков разные масштабы т.к. значения сил на разных ступнях сильно отличаются. В итоге, общее число выходов сети составляет 330 – 370 для контрольных точек суставов и 40 для сил [9].
Выводы. Результаты, полученные созданной СОР, были протестированы и сравнены с точными результатами для того, чтобы оценить точность работы сети. Результаты предсказания в обеих задачах были достаточно точными и быстрыми, как при субъективной оценке, так и при объективной.
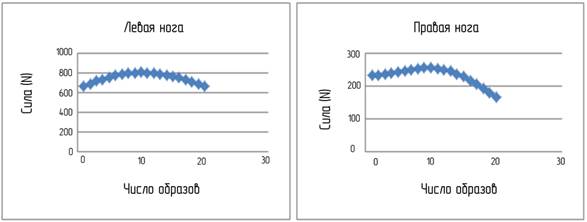
Рис. 3. Графики 20 максимальных значений сил реакции опоры для обеих ступней для одного элемента обучающей выборки.
Исследованные задачи движения были выбраны так, чтобы оценить способность СОР решать разные задачи. В задаче о ходьбе имеется относительно большое число выходов двух разных типов и 12 входов. Сеть смогла точно предсказать все выходные параметры задачи. Задача о запрыгивании на ящик является более сложной и имеет большое число граничных условий. Более того, эта задача требует большой точности предсказаний, т.к. во время движения появляются точки соприкосновения рук и ступней с ящиком. Сконструированная для этой задачи сеть справилась со всеми сложностями, достигнув очень большой скорости и точности работы.
Использование методологии для подбора ширины Гауссиана сети в зависимости от задачи также оказалось верным и логичным решением. Работоспособность методологии была проверена при тестировании различных результатов на обучающей выборке и вне неё. Стоит отметить, что подобранная ширина Гауссиана отражает размерность задачи (число входных параметров), причем большее пространство входных данных требует большее значение ширины, что покрыть все пространство обучающей сетки. Лучшее значение ширины Гауссиана для задачи о ходьбе – 0.45, в то время как для задачи о запрыгивании на ящик – 0.05.
С другой стороны, использование ИНС при предсказании движения сопряжено с некоторыми трудностями и ограничениями:
- Профессиональная и автоматическая постановка задачи
- Оптимальный размер обучающей выборки для задачи
- Экстраполяция точности предсказаний при работе с точками вне обучающей выборки
Третье ограничение, однако, в настоящее время не критично, поскольку в процессе обучения были использованы экстремальные комбинации входных данных для того, чтобы сеть могла выдать приемлемые результаты при любых возможных входных данных.
Библиографическая ссылка
Тхет П.С., Басанько А.С., Белов Ю.С. ПРЕДСКАЗАНИЕ ДВИЖЕНИЙ ПРИ ПОМОЩИ НЕЙРОННОЙ СЕТИ // Международный студенческий научный вестник. 2019. № 2. ;URL: https://eduherald.ru/ru/article/view?id=19599 (дата обращения: 05.04.2025).