

Основной проблемой в высокопроизводительных вычислениях является планирование и назначение задач по процессорам (ЦП). Классическая программная реализация функций планирования способствует увеличению временных затрат на синхронизацию процессов. Для разрешения данной ситуации, существует два подхода: реализация функций планирования и диспетчеризации процессов с общей и индивидуальной на каждый ЦП очередью задач [4]. В работах [1–3, 5] обсуждались вопросы создания и аппаратной реализации реконфигурируемого вычислительного кластера и системы. Здесь приведем результаты имитационного моделирования в среде GPSS World.
Имитационная модель демонстрирует процесс обработки задач в реконфигурируемой вычислительной системе (РВС). Среднее время обслуживания требования берется по экспоненте как произведение времени кванта (tk) на количество квантов (k), которые необходимы для обслуживания задачи ЦП. Исследуемая РВС представляется массивом ЦП с планировщиком задач [6]. Схема имитационной модели системы представлена на рис. 1.
Здесь S0 – источник задач для обработки в вычислительной системе; O1 – очередь ожидающих задач; ПЗ – планировщик задач; ПУ1–ПУi – центральные процессоры.
Задачи из S0 помещаются в O1, если там имеется хотя бы одно свободное место. Иначе они приостанавливаются и ожидают освобождения очереди. Из очереди готовые к обработке задачи назначаются на обслуживание по ЦП. Они выбираются в порядке поступления в очередь.
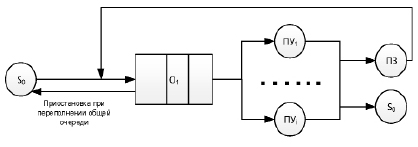
Рис. 1. Схема для имитационного моделирования РВС с общим планировщиком задач
После окончания кванта обработки проверяется, завершена ли обработка данной задачи полностью. При положительном ответе обслуженная задача покидает систему. Задача обрабатывается на i-м процессоре временной квант (k), по окончанию которого из зарезервированной переменной задачи отнимается время одного кванта (tk). Далее задача проверяется на полноту выполнения операцией сравнения зарезервированной переменной задачи, которая отвечает за остаток времени требуемого для завершения обслуживания, с нулем. Если задача уже обслужена целиком, она покидает РВС. В противном случае, задача ждет освобождения планировщика, до тех пор не освобождая занимаемый i-й ЦП, создается очередь ожидающих (приостановленных) процессоров. Одновременно с освобождением планировщика задача поступает в него на обработку. Затем она имеет возможность вернуться в общую очередь ожидающих обслуживания требований при наличии в ней хотя бы одной ячейки свободного места, в противном случае – она покидает систему неполно обработанной.
В ходе проведенного вычислительного эксперимента изменялась трудоемкость задач, поступающих на выполнение в РВС, включающую общий планировщик. Загрузка ЦП находилась на уровне 65 %, что соответствует средней загрузке системы. Число ЦП варьировалось от 2 до 20. Трудоемкость задач принята следующей: для задач с низкой трудоемкостью (требующих высокой реакции на запрос) – 0,1 мс, для задач со средней трудоемкостью– 0,5 мс, наконец, для самых трудоемких задач – 1,0 мс. Время кванта для проведенных опытов принято постоянным и равным 0,1 мс. Время работы планировщика при переключении контекста задач составляет 5 мкс (получено измерением на системе-прототипе); время перезагрузки кэш-памяти принято равным 5 мкс (оценка получена с помощью тестового пакета RightMark Memory Analyzer). Из рис. 2 следует, что загрузка планировщика со стратегией разделения во времени растет с понижением трудоемкости задач, т.е. с увеличением реактивности РВС.
Результаты проведенных экспериментов над имитационными моделями позволяют сделать следующие выводы. В большинстве случаев показатели характеристик имитационных моделей, таких как загрузка ПЗ, время реакции, средняя длина очереди, и т. д., имели небольшой разброс относительно друг друга, что соответствует адекватности и целесообразности разработанных моделей.
Изучая функционирование моделей РВС с разными типами диспетчеров задач, на практике было установлено, что производительность у системы с распределенными диспетчерами быстрее, чем у системы с одним диспетчером и общей очередью готовых к выполнению процессов. Данный вывод подтвержден на основе полученных характеристик загрузки самого ПЗ, а также его времени реакции, то есть другими словами, задачи распределяются по n-планировщикам к n-процессорам, что позволяет системе работать быстрее, чем в системе с общей очередью и одним планировщиком.
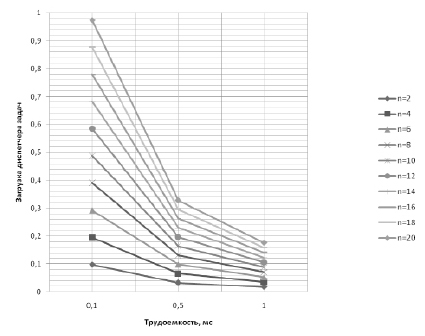
Рис. 2. Зависимость загрузки планировщика от трудоемкости задач в РВС с общим планировщиком
Рассматривая результаты зависимостей средней длины очереди перед узлом ПЗ-ЦП, установлено, что в системе ПЗ с общей очередью, при увеличении количества ЦП значение средней длины стремится к нулю, что говорит о неравномерности распределения задач по ЦП. Данная ситуация способствует к простаиванию некоторых процессоров, то есть ресурс РВС будет задействован не эффективно. В системе ПЗ с распределенными очередями, значение средней длины очереди растет равномерно с повышением числа процессоров, т. е. в этом случае ресурсы РВС задействованы полностью.
В результате проведенного моделирования получено, что число ЦП в составе рассматриваемой РВС для цифровой обработки сигнала напрямую зависит от параметров задач и архитектуры используемого в системе планировщика задач.
Работа выполнена при финансовой поддержке РФФИ (Проект № 16–07–00012 А).
Библиографическая ссылка
Мартенс-Атюшев Д.С., Мартышкин А.И. ЭКСПЕРИМЕНТ ПО ИССЛЕДОВАНИЮ ПОДСИСТЕМЫ ПЛАНИРОВАНИЯ РЕКОНФИГУРИРУЕМОЙ ВЫЧИСЛИТЕЛЬНОЙ СИСТЕМЫ ДЛЯ ЦИФРОВОЙ ОБРАБОТКИ СИГНАЛА // Международный студенческий научный вестник. 2017. № 4-9. ;URL: https://eduherald.ru/ru/article/view?id=17722 (дата обращения: 06.04.2025).