

ВВЕДЕНИЕ
Надежность двигателя беспилотного летательного аппарата (БПЛА) является одним из ключевых факторов, определяющих эффективность и безопасность его эксплуатации. В условиях современного развития технологий, когда БПЛА находят все более широкое применение в таких сферах, как военное дело, доставка грузов, мониторинг окружающей среды и сельское хозяйство, требования к надежности и производительности их двигателей становятся критически важными [1].
При управлении БПЛА требуется контролировать большое количество параметров, которые выполняются последовательно несколькими потоками управляющего процессора, от грамотного распределения задач зависит стабильность и надёжность работы БПЛА [2].
Двигатели БПЛА могут быть как электрическими, 15.11.2024 так и тепловыми (двигателями внутреннего сгорания), и каждый тип имеет свои преимущества и ограничения. Электрические двигатели характеризуются высокой надежностью, низким уровнем шума и простотой в эксплуатации, однако они ограничены по времени полета из-за емкости аккумуляторов. С другой стороны, ДВС обеспечивают большую мощность и длительность работы, но требуют более сложного обслуживания и могут быть менее надежными в сложных условиях.
Надежность двигателя напрямую связана с конструкцией, выбором материалов, технологией производства и эксплуатационными условиями. Поэтому, для обеспечения долговечности и бесперебойной работы БПЛА, необходим комплексный подход к разработке и эксплуатации двигательных систем. Это включает в себя проведение регулярного технического обслуживания, мониторинга состояния и диагностики, а также внедрение новых технологий и материалов.
Таким образом, исследование надежности двигателей БПЛА представляет собой важную задачу, которая включает как теоретические, так и практические аспекты. В данном контексте акцент будет сделан на анализ факторов, влияющих на надежность, обзор современных технологий двигателей, а также на подходы к повышению надежности в условиях реальной эксплуатации [3].
1 УСТРОЙСТВО БПЛА
БПЛА состоит из следующих основных компонентов:
Корпус, крылья и рули, двигатель, аппаратура управления, бортовая электроника, передатчик и приемник.
Управляется с помощью программного обеспечения, которое запрограммировано на контроллере полета или встроенном компьютере. Вот некоторые из основных компонентов системы управления: контроллер полета, автопилот, компьютер, устройства управления [4].
Регулятор скорости (ESC, от английского Electronic Speed Controller): используется в различных приложениях, включая беспилотные летательные аппараты (БПЛА), радиоуправляемые модели и электромобили. Функции ESC регулятора: управление скоростью, изменение направления вращения, защита от перегрузок, обратная связь и диагностика, блокировка при отсутствии сигнала:
Принцип работы:
ESC получает сигналы управления от радиопередатчика через приемник.
ESC обрабатывает поступившие сигналы и определяет, сколько энергии необходимо подать на двигатель для достижения заданной скорости.
На основе обработанных данных ESC управляет транзисторами, которые регулируют ток, подаваемый на двигатель.
ESC автоматически переключает ток между фазами двигателя, обеспечивая его плавное и эффективное вращение.
Базовые ESC обеспечивают простое управление скоростью и направлением, часто используются в радиоуправляемых моделях.
Смарт ESC оснащены дополнительными функциями, такими как программируемые режимы работы, возможность подключения к компьютеру для настройки и мониторинга, а также функции защиты.
ESC с обратной связью используют датчики для мониторинга параметров двигателя и могут адаптироваться к изменяющимся условиям, обеспечивая более точное управление [5].
Выделяют классы БПЛА:
Класс 1. БПЛА самолетного типа взлетной массой до 10 кг с электрическим двигателем.
Класс 2. БПЛА самолетного типа взлетной массой до 100 кг с двигателем внутреннего сгорания.
Класс 3. БПЛА самолетного типа взлетной массой до 1000 кг.
Класс 4. БПЛА вертолетного типа [6].
Анализ эксплуатации беспилотных летательных аппаратов (БПЛА) с электрическим двигателем включает в себя несколько ключевых аспектов, таких как эффективность, надежность, стоимость эксплуатации и влияние различных условий на производительность.
Бесколлекторный двигатель обычно состоит из следующих основных компонентов: статор, ротор, электронный контроллер [7].
Принцип работы:
Создание магнитного поля: когда на обмотки статора подается электрический ток, создается магнитное поле.
Взаимодействие магнитных полей: Постоянные магниты на роторе взаимодействуют с магнитным полем статора. Это взаимодействие создает вращающий момент, который заставляет ротор вращаться.
Электронное управление: контроллер определяет, когда и как подавать ток на обмотки статора.
Обратная связь: некоторые системы используют обратную связь для регулирования скорости и крутящего момента, что позволяет двигателю работать более эффективно [8].
2 РАСЧЁТ НАДЁЖНОСТИ
Рассчитаем надежность функционирования бесколлекторного двигателя БПЛА типа «квадракоптер». Для этого составим логическую схему системы, представленную на Рисунке1.
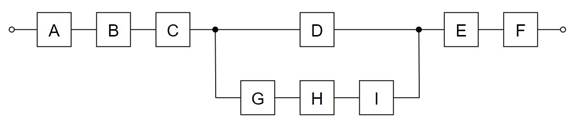
Рисунок 1 – Логическая схема системы автоматического регулирования
В схеме: А – магнитный датчик; В – линия связи 1; С – блок управления; D – линия связи 2; E – ESC регулятор; F – обмотка двигателя, G – линия связи 3; H – контроллер питания; I – аккумулятор.
2.1 Расчет показателей надежности
В Таблице 1 приведены показатели интенсивности отказов элементов, входящих в состав системы.
Таблица 1 – Интенсивность отказов элементов
|
Обозначение |
Элемент |
Значение интенсивности отказов, ч-1 |
|
A |
Магнитный датчик |
0,53*10-6 |
|
B |
Линия связи 1 |
1,9*10-6 |
|
C |
Блок управления |
0,27*10-6 |
|
D |
Линия связи 2 |
1,9*10-6 |
|
E |
Регулятор скорости |
0,35*10-6 |
|
F |
Обмотка двигателя |
10,1*10-6 |
|
G |
Линия связи 3 |
1,9*10-6 |
|
H |
Контроллер питания |
0,38*10-6 |
|
I |
Аккумулятор |
2,2*10-6 |
Примем следующие допущения при построении математической модели надежности системы:
1. Элементы прошли период приработки;
2. Справедлив экспоненциальный закон распределения;
3. Отказы элементов независимы.
Согласно приведенной схеме, вероятность безотказной работы системы будет выражаться формулой:

Интенсивность отказов данной системы находится по формуле:
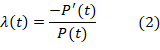
Для вычислений воспользуемся программой Matlab. На Рисунке 2 представлен код вычислений.
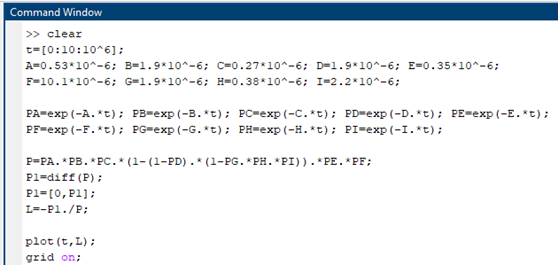
Рисунок 2 – Код вычислений в программе Matlab
На Рисунке 3 представлен график интенсивности отказов системы во времени.
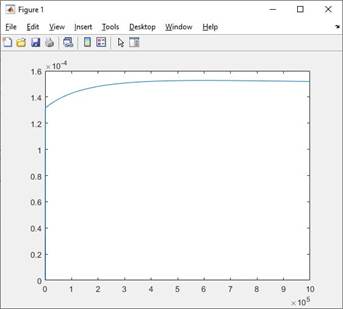
Рисунок 3 – График интенсивности отказов системы во времени
2.2 Повышение надежности системы
К способам повышения надежности систем относят:
1. Увеличение надежности отдельных элементов (замена приборов, исполнительных механизмов, а также устройств с более высокими характеристиками надежности);
2. Упрощение системы при проектировании;
3. Резервирование элементов системы;
4. Систематический контроль и обслуживание системы.
5. Обучение персонала процессам на программах-тренажёрах [9, 10].
Для рассматриваемой системы автоматического регулирования введем резервирование каждого элемента системы. Схема системы с резервированием приведена на Рисунке 4.
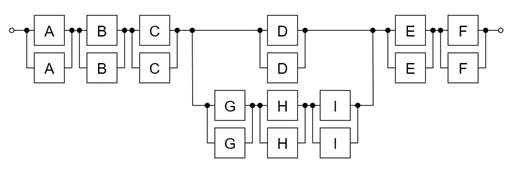
Рисунок 4 – Логическая схема системы с резервированием
Вероятность безотказной работы на каждом из участков будет соответственно равна:

где i – соответствующий участок.
Тогда вероятность безотказной работы зарезервированной системы будет находиться по формуле:

Интенсивность отказов данной системы находится по формуле:
Код вычислений с резервированием системы в программе Matlab представлен на Рисунке 5.
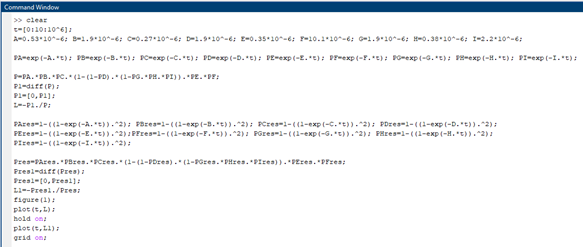
Рисунок 5 – Код вычисления интенсивности отказов системы с резервированием
Графики интенсивности отказов системы с резервированием и без резервирования представлены на Рисунке 6.
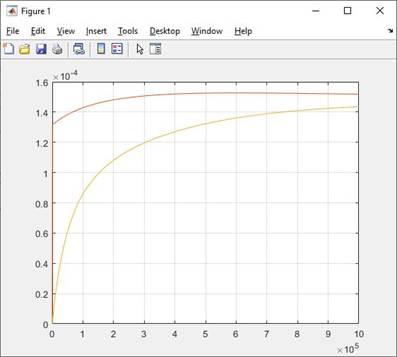
Рисунок 6 – Графики интенсивностей отказов системы с резервированием и без резервирования
Результат повышения надежности рассматриваемой системы определим как отношение интенсивности отказов системы до резервирования к интенсивности отказов системы после резервирования:
Данные поместим в таблицу:
Таблица 2 – Результаты повышения надежности системы
|
t, 105 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
|
10-4 |
1,42 |
1,48 |
1,5 |
1,51 |
1,52 |
1,52 |
1,52 |
1,52 |
1,52 |
1,52 |
|
10-4 |
0,86 |
1,07 |
1,19 |
1,26 |
1,32 |
1,36 |
1,38 |
1,4 |
1,42 |
1,43 |
|
|
1,65 |
1,38 |
1,26 |
1,20 |
1,15 |
1,12 |
1,10 |
1,09 |
1,07 |
1,06 |



Таким образом, из данных Таблицы 2 видно, что резервирование системы позволяет снизить интенсивность отказов в начале эксплуатации более чем в 1,5 раза, сохраняя срок службы системы до конца срока эксплуатации.
ЗАКЛЮЧЕНИЕ
В данной работе было рассмотрено устройство БПЛА и принцип работы бесколлекторного двигателя. В практической части работы был произведен расчет параметров надежности функционирования бесколлекторного двигателя БПЛА.В качестве метода повышения надежности был выбран метод резервирования. Для оценки выполненного повышения надежности системы было произведено сравнение результатов вычисления интенсивности отказов резервированной и нерезервированной системы.
Проектный расчет надежности функционирования бесколлекторного двигателя БПЛА требует комплексного подхода, включающего анализ конструкции, эксплуатационных условий и использования современных технологий. Надежность двигателя является ключевым фактором, определяющим общую эффективность и безопасность БПЛА. Учитывая вышеизложенные аспекты, можно обеспечить высокую надежность работы двигателя, что в свою очередь повысит общую надежность и безопасность полета беспилотного летательного аппарата.