

Современная наука и технологии продолжают развиваться, не имея какого-либо предела. В настоящее время космические аппараты стараются сделать все более малыми и компактными, при этом они не уступают в функциональном назначении аппаратам, выпускаемым в прошлом. С начала 90-х годов ХХ века активно разрабатывались малые спутники. В XXI веке началось активное развитие отрасли производства малых космических аппаратов (МКА).
Дистанционное зондирование Земли (ДЗЗ) – наблюдение поверхности Земли авиационными и космическими средствами, оснащёнными различными видами съемочной аппаратуры. Рабочий диапазон длин волн, принимаемых съёмочной аппаратурой, составляет от долей микрометра (видимое оптическое излучение) до метров (радиоволны). Методы зондирования могут быть пассивные и активные – использующие вынужденное излучение объектов, инициированное искусственным источником направленного действия.
Малый космический аппарат (МКА) – тип искусственных спутников земли, имеющих малый вес и размеры. Обычно малыми считают спутники с массой менее 0.5 – 1 тонны. Существует более подробная классификация типов в зависимости от массы. Запуск малых спутников на орбиту может производиться более простыми ракетами (например, РН на базе МБР) или в качестве дополнительной нагрузки к обычным спутникам.
Проектируемый КА сможет в одинаковом объеме выполнять функции как спутника связи, так и спутника дистанционного зондирования Земли, а также множество других функции, в зависимости от аппаратуры модуля полезной нагрузки.

Система управления (датчики, ИО) – служит для управления оборудованием спутника на основании показаний датчиков и в соответствии с командами информационной системы;
Система ориентации (гравитационная штанга) – служит для управления ориентацией спутника относительно поверхности Земли;
Система передачи информации (телеметрия) – служит для передачи данных со спутника в центр управления и получения команд;
Система термостабилизации служит для поддержания температуры в объеме спутника в соответствии с заданными параметрами и требованиями к оборудованию спутника.
Система питания предназначена для питания спутника с суммарной мощностью энергосистемы 20 Вт.
Для питания систем спутника необходимо предусмотреть ряд напряжений:
+3,3В – 1А (для питания системы видеосъемки)
+5В – 1,5А (узел управления и отправки данных)
+12В – 0,5А (для системы термостабилизации)
12В – 0,5А переменного тока частотой 400 Гц для питания двигателей системы стабилизации и двигателей раскрыва солнечной батареи.
Функциональная система электропитания состоит и нескольких независимых узлов:
А) Солнечная батарея – источник энергии для питания спутника. Служит для преобразования энергии солнца в электрическую энергию. Мощность, отдаваемая солнечной батареей, должна обеспечить как питание энергосистемы, так и заряд аккумуляторной батареи для питания аппаратуры спутника при нахождении в тени Земли. Примем, что время работы солнечной батареи будет равно времени нахождения спутника в тени. Таким образом, мощность солнечной батареи должна составить удвоенную мощность энергосистемы спутника. Для нивелирования старения фотоэлементов солнечной батареи примем коэффициент запаса  , тогда отдаваемая мощность солнечной батареи должна составить:
, тогда отдаваемая мощность солнечной батареи должна составить:

Номинальное напряжение на выходе солнечной батареи примем:

Б) Контроллер напряжения солнечной батареи служит для стабилизации напряжения получаемого от солнечной батареи.
Применение контролера позволяет при изменении входного напряжения в зависимости от уровня освещенности солнечной батареи получить на выходе стабильное напряжение с заданным напряжением. [5]
Напряжение на входе контроллера солнечной батареи изменяется от 33,6 В при заряженной батарее, в процессе работы по мере разряда солнечной батареи оно стабилизируется на отметке около 25 В и держится до полной разрядки аккумуляторной батареи.
Контроллер заряда аккумуляторной батареи собран по схеме рекомендованной изготовителем. Каждый из аккумуляторов батареи подключен к своему контроллеру, таких узлов восемь они соединены последовательно.
Схема контроллера солнечной батареи собрана на интегральной микросхеме LM2596HV представляющей собой импульсный стабилизатор напряжения. Позволяет получит на выходе напряжение 36 В при снижении напряжения на солнечные батареи до 40 В. Таким образом, работоспособность узла заряда аккумуляторной батареи сохраняется в диапазоне входных напряжений от 40 до 60 В.
Стандартная схема включения приведена на рисунке 1.
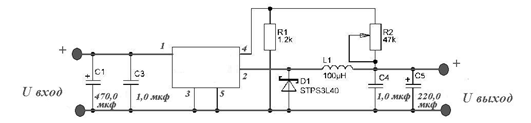
Рисунок 1 – схема включения контроллера
В) Контроллер заряда аккумуляторной батареи служит для заряда аккумуляторной батареи и предотвращает перезаряд. Его параметры определяются емкостью и типом используемой аккумуляторной батареи.
Контроллер заряда аккумулятора представляет собой специализированную микросхему, разработанную для обеспечения оптимального режима заряда аккумуляторной батареи. Контроллер заряда выполнен на ИМС - LC05111C02MTTTG.
Контроллер LC05111C02MTTTG обеспечивает точный контроль тока и напряжения, что позволяет обеспечить:
· Защиту от перезаряда
· Защиту от переразряда
· Защиту от превышения зарядного тока
· Защиту от превышения разрядного тока
Комплексная надежная защита реализуется при помощи одной микросхемы LC05111C02MTTTG и нескольких внешних пассивных компонентов изображенных на рисунке 2.
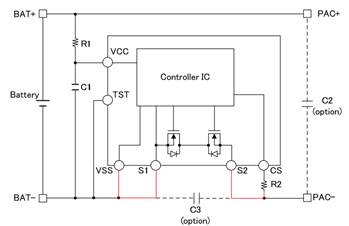
Рисунок 2 – микросхема LC05111C02MTTTG
Г) Аккумуляторная батарея служит основным источником питания энергосистемы спутника. В качестве аккумулятора предполагается использование литий-железо-фосфатный аккумулятор - LiFePO4 (LFP).
Д) Стабилизаторы напряжения обеспечивают необходимые напряжения для питания аппаратуры спутника. Каждый из стабилизаторов позволяет регулировать выходное напряжение, это позволит использовать аппаратуру с отличным от принятого напряжения питания без изменения энергосистемы спутника.
Е) Инвертор напряжения позволяет получить из постоянного напряжения переменное с заданным параметрами.
Для получения переменного напряжения используем преобразователь на ИМС 1211ЕУ1, схема включения который приведена на рисунке 3. [4]
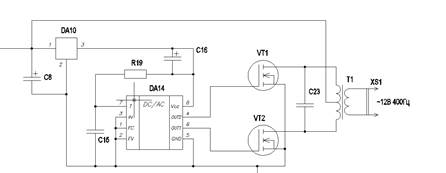
Рисунок 3 – Инвертор переменного тока
Основная особенность микросхемы КР1211ЕУ1 – наличие двух достаточно мощных каналов управления ключами, работающих в противофазе с обязательной паузой между выходными импульсами (импульс во втором канале появляется через некоторое время после окончания импульса в первом, и, наоборот; в западной терминологии эта пауза носит название Dead time - время простоя). Благодаря этому микросхема хорошо подходит для построения импульсных преобразователей напряжения. [6]