

Введение
Развитие интеллектуальных систем управления в настоящее время, является важной задачей. Это время компьютеризации и интеллектуализации обширных областей нашей жизни, когда классическая теория автоматического управления уже не в состоянии решить современные проблемы управления. На стыке современной теории управления и искусственного интеллекта активно формируется и совершенствуется область исследований и разработок, называемая интеллектуальным управлением [1]. Значительно изменился и характер труда оператора. От физического труда он стал приближаться к умственному. Изменился сам характер взаимодействия оператора с машиной – системы в большей части стали информационными, а управления – дистанционными.
Создание таких систем требует, с одной стороны, привлечения данных науки, с другой стороны, – нового принципа при разработке таких человеко-машинных комплексов. Следовательно, возникает задача математического моделирования работы человека-оператора, которая может быть успешно решена с привлечением программного комплекса «МВТУ». Цель статьи – показать возможность использования алгоритмов для построения математической модели принятия решения человеком-оператором в эргатических системах управления.
Эргономика – это наука о взаимодействии оператора с машиной и средой. Предметом ее является кибернетическая система оператор – машина – среда [2].
Частными задачами эргономики являются обоснование методов рационального разделения функций между оператором и машиной; синтез систем и обеспечение при этом совместимостей оператора, машины и среды, проектирование рабочей деятельности операторов для эксплуатации и обслуживания систем, отбор и профессиональная подготовка операторов, объедение их в эффективно действующие коллективы, выработка и обоснование общих и частных эргономических требований к машинам и т.д.
В эргатических системах управления оператор является ответственным звеном в выполнении системой поставленной задачи. Он осуществляет функции непосредственного управления и включается в работу как бы последовательно с техническими элементами системы (машиной). Основной задачей оператора в системе управления является – задание управляющих воздействий для достижения цели, регулирование, слежение стабилизация и приведение координат выхода системы к их заданному значению.
Эта система замкнута на человека-оператора, и в целом она не может функционировать, если оператор будет отключен от системы. В данной системе оператор, кроме приема, математической и логической обработки, извлекаемой из приборов и сигнализаторов информации принятия решения, осуществляет функции управляющего, энергетического звена ЭС (эргатической системы). Оператор реализует свое решение через органы управления путем приложения, соответствующего на них воздействия.
ЭСУ имеют, по крайней мере, две разновидности, в одной из которых оператор осуществляет слежение с компенсацией, а в другой слежение с преследованием. При слежении с компенсацией оператор наблюдает только рассогласование между текущим выходным показателем (координатой) системы и заданным значением. Его задача состоит в том, чтобы довести величину рассогласования до нуля или требуемого значения.
При слежении с преследованием оператор наблюдает величину как входного, так и выходного сигналов системы. Задача состоит в том, чтобы свести к min рассогласование между входом и выходом системы. В этих условиях требуется, чтобы, управляя машиной, изменять выход и тем самым как бы, «преследовать» вход системы.
Особенности деятельности человека-оператора с учетом СОИ. Для оптимизации СОИ большое значение имеет проблема моделирования поведения человека-оператора. В настоящее время разработано достаточное количество математических моделей поведения человека. В основном модели предназначаются для исследования систем человек — машина» в режиме регулирования (динамического звена)
Структура системы управления с человеком-оператором, работающим в замкнутом контуре управления, приведена на рис.1.
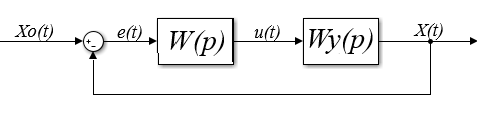
Рис. 1-Структура системы управления с человеком-оператором.
Задача разделения функций между оператором и машиной в будущей системе состоит в том, чтобы обеспечить заданную степень надежности и других выходных параметров ЭС при min затрат на технику и наименьшей напряженности оператора. Эта задача довольно четко формулируется в рамках кибернетической теории оптимального управления.
Оптимальным вариантом распределения функций считается такой, при котором критерий качества системы принимает наилучшее значение и удовлетворяет наложенным на систему ограничениям.
Для оценки соответствия динамики объекта оператору, исследователями предложено весьма значительное число моделей поведения (деятельности) оператора в ЭС: как линейных, так и нелинейных, как непрерывных, так и дискретных. Степень их приближения к реальной деятельности различна.
Авторами статьи [3] предлагаются принципы построения аналитико-имитационной модели человека-оператора, которые бы учитывали функционирование человека как на физическом и психофизиологическом уровне, так и уровни логического вывода для решения человеком задачи управления технологическим процессом.
1 Методы исследования и анализ параметров моделей человека-оператора
Развитие математических моделей человека-оператора началось к концу II Мировой войны. Когда человек широко использовался при прослеживании цели для зенитных орудий и подобных устройств. Впервые к решению проблемы с инженерной точки зрения подошли Тастен в Англии, Рагаззини в США Оба исследовантеля описывали дейтсвия человека-оператора линейными дифференциальными уравнениями [4].
В дальнейшем исследователями было предложено весьма значительное число моделей деятельности оператора в эргатических системах:
а) линейные;
б) нелинейные;
в) непрерывные;
г) дискретные (импульсные);
Степень их приближения к реальной деятельности различна.
2 Математическая модель человека-оператора Тастена
Модель Тастена, основана на гармоническом анализе выходных величин, когда входная величина является суммой трех синусоид. Получающаяся в результате передаточная функция модели имеет вид
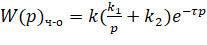
 (1)
(1)
где
p – комплексная величина
τ – временная задержка (нейромышечное запаздывание)
 – параметры, которые зависят от выбора динамических характеристик управляемого объекта.
– параметры, которые зависят от выбора динамических характеристик управляемого объекта.
Исследование модели Тастена проведем с использованием программного комплекса «МВТУ». Структурная схема модели Тастена представленная в МВТУ имеет вид, на рис. 2. Для настройки параметров модели используем единичный входной сигнал.
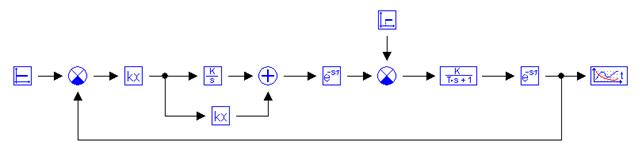
Рис. 2 – Структурная схема модели Ч-О Тастена
Передаточная функция модели Ч-О: имеет переходные характеристики при единичном входном сигнале на рис.3 (а и б)
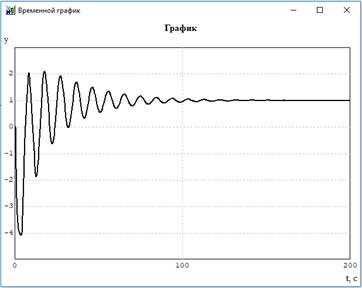
Рис. 3,а – Переходная характеристика при 
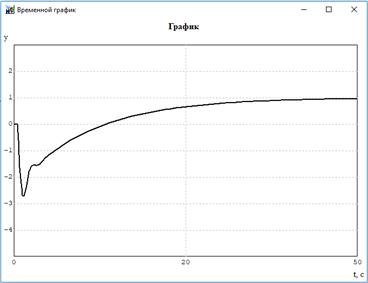
Рис. 3,б – Переходная характеристика при

Исследования модели человека-оператора проведем как реакцию на чистые синусоиды так и на отслеживание более сложных сигналов, структура для исследования на рис. 4.
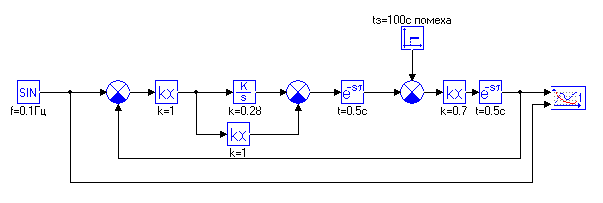
Рис. 4 – структурная схема модели Ч-О Тастена при fвх=0,1 Гц
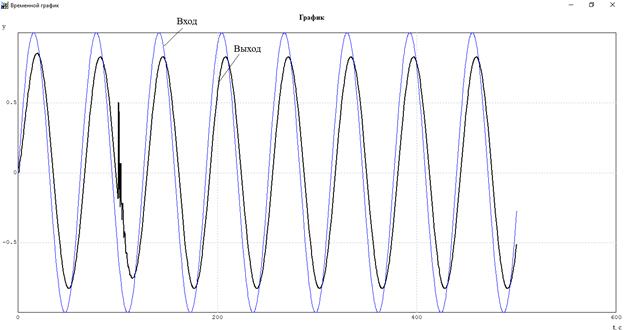
Рис.5 –переходная характеристика при частоте входного сигнала f= 0,1 Гц
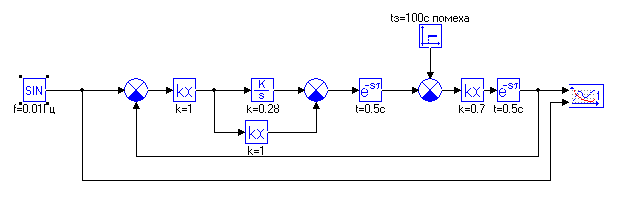
Рис.6 – структурная схема модели Ч-О Тастена при fвх=0,01 Гц
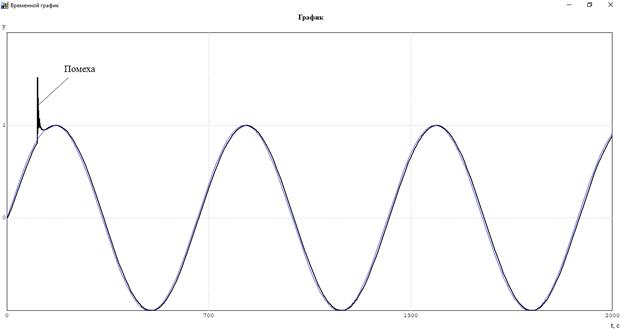
Рис.7 –переходная характеристика при частоте входного сигнала f= 0,01 Гц
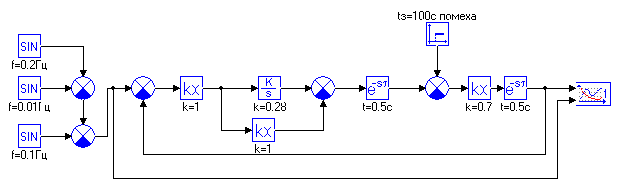
Рис.8 – структурная схема модели Ч-О Тастена при отслеживании сложных сигналов выраженных суммой трех синусоид.
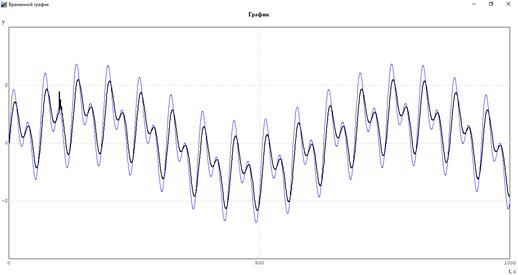
Рис.9 – переходная характеристика при отслеживании сложных сигналов
Свойства квазилинейной модели деятельности человека-оператора
Результаты исследования моделирования человека-оператора на программном комплексе МВТУ показывают хорошую реакцию на помеху, которую модель отрабатывает, что подтверждает адекватность данной модели и квазилинейная система имеет свойства:
1. Система может, описана линейным дифференциальным уравнением, коэффициенты которого зависят от структуры системы и полосы частот входного сигнала, но остаются постоянными для частной системы.
2. Линейное соотношение определяет лишь часть выходной величины системы (линейную часть). Дополнительно может присутствовать случайная или не коррелированная составляющая. Обоснованность использования квазилинейной модели зависит от той доли выходной величины, которую она определяет.
Ответная реакция человека-оператора на чистые синусоиды количественно отличается от той, которая имеет место при отслеживании более сложных сигналов.
Из этого можно сделать два вывода:
1. При достаточно низких частотах (f = 0,01 Гц) модель адекватно представляет основную часть выходной величины человека-оператора (рис.7).
2. По мере увеличения частоты, характеристики человека-оператора, производящего отслеживание, постепенно откланяются от характеристик, ожидаемых при использовании линейных неизменяемых моделей.
Основные модели, и методы, на базе которых они были созданы, приведены в [5].
Как видно из приведенных данных, при разработке моделей человека-оператора, применяются различные методы, сформированные в классической теории автоматического управления. Однако при исследовании разработанных моделей, мы обнаруживаем разработки моделей на основе методов спектрального анализа и настройки параметров. В настоящее время все большее распространение получают адаптивные методы и нейросетевые модели деятельности человека-оператора [6].