

Российская ССН второго поколения ГЛОНАСС продемонстрировала высокие точностные характеристики определения координат, скорости и времени воздушных, космических, морских и наземных подвижных средств. В настоящее время она находится в начале широкого практического освоения [1]. Почти во всех странах технологии ССН применяются во многих областях жизни: в геодезии, сотовой связи, авиации, автотранспорте и т.д. (рис. 1).
Рис. 1. Применение ССН
Однако ССН присущ ряд существенных недостатков (низкая помехоустойчивость, влияние геометрического фактора, нарушение целостности, сбои в работе бортовых приемников, ухудшение точности при ионосферных возмущениях, высоком уровне солнечной активности и т.д.), что снижает эффективность их применения ввиду возможного значительного ухудшения характеристик, прежде всего точности определения координат [2]. Поэтому для достижения наибольшей навигационной точности – вопрос остается таким же актуальным на сегодняшний день и представляет практический интерес исследования точности наземной аппаратуры потребителя.
Для проведения исследований был проведен ряд экспериментов с помощью программно-аппаратного комплекса. В состав программно-аппаратного комплекса входит следующее оборудование: антенна, приемник ГЕОС-1М, имитатор 3803М и ЭВМ
Приемник сигналов ССН ГЕОС – 1М (рис. 2, 3; блок 2) – предназначен для вычисления текущих координат и скорости объекта в реальном масштабе времени в автономном режиме формирования секундной метки времени и обмена с внешним оборудованием по последовательным портам RS232 и USB [3].
Имитатор СН-3803М (рис. 3, блок 1) позволяет имитировать сигналы ССН ГЛОНАСС, GPS, обеих систем совместно, а также имитировать различные сценарии (тип объекта, траектории движения, воздействие ионосферных и тропосферных погрешностей, изменение уровней сигналов спутников и пр.) [4].
Блок 3 (рис. 2, 3) состоит из модулей обработки данных и измерения ошибки, что позволяет записать и провести обработку полученных результатов эксперимента. Программные модули обработки данных разработаны в среде графического программирования LabVIEW и Excel.
Проведен натурный эксперимент, на дату 13.03.2018 г., где антенна имеет геодезическую привязку и расположена в точке с координатами В=52°15´25,8´,L=104°21´22,1´, Н=503,18 м. На интервале времени в течение 1 часа (с 5:34 до 6:34 UTC). Приемник Геос-1м выдавал координаты с дискретностью в 1 с. Структурная схема представлена на рис. 2.
С помощью имитатора СН-3803М были воспроизведены навигационные условия на дату и время натурного эксперимента с учетом влияния среды распространения, ионосферы и тропосферы. Структурная схема представлена на рис. 3.

Рис. 2. Структурная схема программно-аппаратного комплекса для натурного эксперимента

Рис. 3. Структурная схема программно-аппаратного комплекса для полунатурного эксперимента
Сигналы от навигационных спутников при натурном эксперименте были затенены высотными объектами (многоэтажный дом). Поэтому для соблюдения условии навигационного сеанса при проведении полунатурного эксперимента были исключены из решения навигационной задачи спутники ГЛОНАСС под номером 3 и 19.
По результатам экспериментов проводился анализ обработанных данных. На рис. 4 представлены графики горизонтального (HDOP), а на рис. 5 вертикального (VDOP) геометрического фактора по выходным данным из приемника ГЕОС-1М.
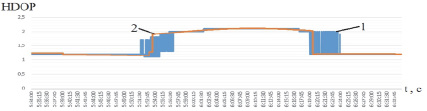
Рис. 4. Геометрический фактор (HDOP):
1 – для натурного эксперимента; 2 – для полунатурного эксперимента
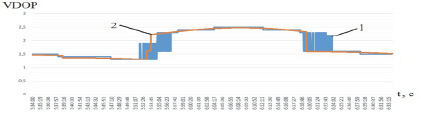
Рис. 5. Геометрический фактор (VDOP):
1 – для натурного эксперимента; 2 – для полунатурного эксперимента
Графики показывают, что условие навигационного сеанса соблюдены т.е. при полунатурном моделировании результаты совпадают с натурным, что говорит о правильности формируемой группировки имитатором СН-3803М. Мгновенное изменение значений ГФ обусловлено влиянием здания, что привело к захвату или поиску сигналов от спутников №3 и 19.
Для исследования точности измерения координат при полунатурном и натурном экспериментах необходимо найти математическое ожидание (mB, mL, mH) по формуле (1):
 , (1)
, (1)
где xi – измеренные для i-го момента времени значения долготы (L), широты (B) и высоты (H); n – количество измерений.
Далее определялись ошибки измерений. По формуле (2) определяется ошибка по высоте:
 . (2)
. (2)
Определение ошибки по широте, формула (3):
 . (3)
. (3)
Определение ошибки по долготе, формула (4):
 . (4)
. (4)
Результаты расчетов представлены на графиках (рис. 6–8, кривые 1 – результаты натурного эксперимента, кривые 2 – результаты полунатурного эксперимента).
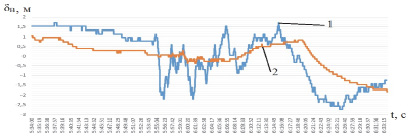
Рис. 6. Ошибка измерения по широте
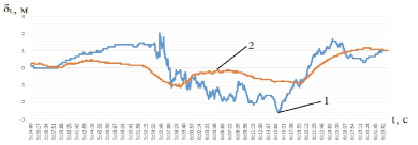
Рис. 7. Ошибка измерения по долготе
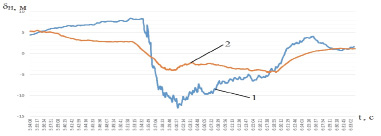
Рис. 8. Ошибка измерения по высоте
По представленным графика можно заметить, что полунатурный эксперимент показал соответствия с натурным экспериментом по значениям ГФ. Некоторые различия в результатах экспериментов можно объяснить тем, что при полунатурном моделировании были не соблюдены некоторые факторы. Таким образом, для достижения максимального соответствия экспериментов, нужно учесть дополнительное влияние ошибок при многолучевости и псевдодальности. Данные ошибки будут исследоваться в дальнейших исследованиях при работе ССН ГЛОНАСС, GPS, а также с GNSS.