

Наряду с колебательными системами, в которых энергия с течением времени может только уменьшаться из-за диссипации, существуют и такие, в которых возможно пополнение энергии колебаний за счет неустойчивостей. Это может иметь место, когда система в состоянии обмениваться с окружающей средой энергией или веществом, т.е. является энергетически открытой [3].
В открытых системах возникают автоколебания. Это незатухающие колебания в нелинейных диссипативных системах, характеристики которых – амплитуда, частота, форма колебаний определяются параметрами самой системы и не зависят от конкретных начальных условий.
В общих чертах понять природу этого явления – режима автоколебаний можно с помощью качественных соображений.
С течением времени фазовые траектории системы автоколебаний стремятся к некоторому притягивающему множеству – аттрактору. В случае периодических автоколебаний в фазовом пространстве системы наблюдаются устойчивые предельные циклы.
Осциллятор Ван дер Поля: условия устойчивости состояния равновесия. Основной математической моделью при исследовании периодических автоколебательных систем является уравнение осциллятора Ван дер Поля:
 (1)
(1)
где q – динамическая переменная; ? – постоянная величина, управляющая возбуждением автоколебаний. Рассмотрим случай мягкого самовозбуждения системы, когда после сколь угодно малого начального возмущения состояния равновесия наблюдаются колебания с малыми амплитудами. Пока колебания малы и выполняется неравенство  , второе слагаемое уравнения Ван дер Поля будет оказывать дестабилизирующее действие, и колебания будут возрастать. Но с их увеличением указанное неравенство станет нарушаться и коэффициент при
, второе слагаемое уравнения Ван дер Поля будет оказывать дестабилизирующее действие, и колебания будут возрастать. Но с их увеличением указанное неравенство станет нарушаться и коэффициент при  будет положительным в тех интервалах времени, в которых
будет положительным в тех интервалах времени, в которых  . B этих интервалах времени второе слагаемое уравнения будет оказывать демпфирующее влияние. При дальнейшем возрастании колебаний демпфирующее действие будет увеличиваться, и движение системы станет приближаться к стационарному режиму, которому соответствует взаимная компенсация дестабилизирующего и демпфирующего влияний [5]. Движение системы будет стремиться к режиму автоколебаний, которому соответствует постоянное значение амплитуды (рис. 1).
. B этих интервалах времени второе слагаемое уравнения будет оказывать демпфирующее влияние. При дальнейшем возрастании колебаний демпфирующее действие будет увеличиваться, и движение системы станет приближаться к стационарному режиму, которому соответствует взаимная компенсация дестабилизирующего и демпфирующего влияний [5]. Движение системы будет стремиться к режиму автоколебаний, которому соответствует постоянное значение амплитуды (рис. 1).
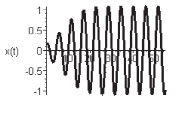
Рис. 1. Автоколебательный режим
При определении условий возникновения автоколебаний важно знать, какие состояния равновесия существуют в системе, и как меняется характер их устойчивости в зависимости от управляющих параметров [3].
Для нахождения точек равновесия и определения характера их устойчивости в осцилляторе Ван дер Поля, обычно рассматривается уравнение (1) в виде
 ,
,
или, по-другому, в форме системы обыкновенных дифференциальных уравнений первого порядка:

Для нахождения особых точек – положений равновесия решается система уравнений

Система имеет только тривиальное решение – единственную точку покоя  .
.
Для определения устойчивости состояния равновесия рассматривают линеаризованную систему в окрестности точки  . Матрицу линеаризации системы вычисляют по формуле
. Матрицу линеаризации системы вычисляют по формуле
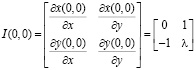 .
.
Для анализа поведения фазовых траекторий в локальной окрестности состояния равновесия  учитываются собственные значения матрицы линеаризации [3, 4]:
учитываются собственные значения матрицы линеаризации [3, 4]:
1. Если  , тогда собственные значения матрицы – отрицательные действительные числа. Состояние равновесия представляет собой устойчивый узел.
, тогда собственные значения матрицы – отрицательные действительные числа. Состояние равновесия представляет собой устойчивый узел.
2. Если  , тогда собственные значения матрицы – комплексно-сопряженные числа с отрицательной действительной частью. Состояние равновесия – устойчивый фокус.
, тогда собственные значения матрицы – комплексно-сопряженные числа с отрицательной действительной частью. Состояние равновесия – устойчивый фокус.
3. Если  , тогда собственные значения матрицы – комплексно-сопряженные числа с положительной действительной частью. Состояние равновесия является неустойчивым фокусом.
, тогда собственные значения матрицы – комплексно-сопряженные числа с положительной действительной частью. Состояние равновесия является неустойчивым фокусом.
4. Если  , тогда собственные значения являются действительными положительными числами. Состояние равновесия представляет собой неустойчивый узел.
, тогда собственные значения являются действительными положительными числами. Состояние равновесия представляет собой неустойчивый узел.
Численное моделирование. Описанное поведение фазовых траекторий осциллятора Ван дер Поля относительно состояния равновесия  проиллюстрированы с использованием численного моделирования. На рисунках представлены фазовые портреты и формы колебаний динамических переменных осциллятора.
проиллюстрированы с использованием численного моделирования. На рисунках представлены фазовые портреты и формы колебаний динамических переменных осциллятора.
Для случая  мы действительно наблюдаем, что начало координат
мы действительно наблюдаем, что начало координат  является особой точкой типа устойчивый узел (рис. 2).
является особой точкой типа устойчивый узел (рис. 2).
На рис. 3 при  фазовая траектория представляет собой спираль, скручивающуюся к точке
фазовая траектория представляет собой спираль, скручивающуюся к точке  – устойчивому фокусу.
– устойчивому фокусу.
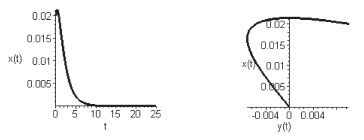
Рис. 2. Форма колебаний и фазовый портрет для осциллятора Ван дер Поля при 
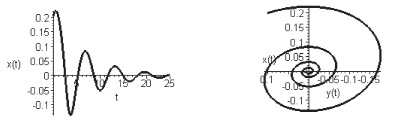
Рис. 3. Форма колебаний и фазовый портрет для осциллятора Ван дер Поля при 
Если  , то состояние равновесия в начале координат теряет свою устойчивость (рис. 4, 5).
, то состояние равновесия в начале координат теряет свою устойчивость (рис. 4, 5).
Замкнутые кривые, к которым неограниченно приближаются все фазовые траектории, описывают стационарные режимы автоколебаний и являются устойчивыми предельными циклами. Их областью притяжения служит вся фазовая плоскость.
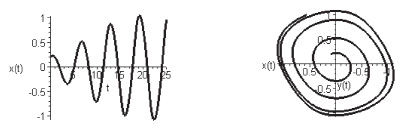
Рис. 4. Форма колебаний и фазовый портрет для осциллятора Ван дер Поля при 
При малых положительных ? предельный цикл имеет форму близкую к эллипсу. Форма автоколебаний будет близка к гармонической (рис. 4). При увеличении ? предельный цикл меняет свою геометрию, искажается. Форма автоколебаний будет иметь релаксационный вид (рис. 5). При  меняется и характер состояния равновесия
меняется и характер состояния равновесия  : неустойчивый фокус переходит в неустойчивый узел.
: неустойчивый фокус переходит в неустойчивый узел.
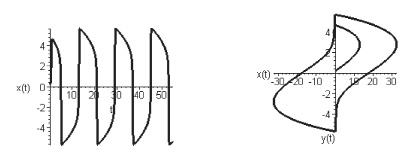
Рис. 5. Форма колебаний и фазовый портрет для осциллятора Ван дер Поля при 
Заключение
В работе было проведено качественное исследование решений уравнения Ван дер Поля, описывающих переход от состояния неустойчивого равновесия к устойчивому предельному циклу. Генератор Ван дер Поля является достаточно простой и общей моделью периодических автоколебаний. Наиболее частое применение это уравнение находит в радиофизике при построении автогенератора электромагнитных колебаний [3]. Современная теория синтеза структуры нелинейной колебательной системы для получения устойчивых предельных циклов развивается в направлении усложнения геометрии циклов и увеличения их числа (многоканальные системы). Задача создания методов синтеза автоколебательных режимов для многомерных систем остается актуальной [1, 2].