

Воздействие электромагнитного излучения (ЭМИ) различных видов на объекты техники и биологии может рассматриваться в виде существенного фактора, который влияет на их работу.
В связи с тем, что сейчас значительным образом выросло число разных источников ЭМИ (в информационных системах, системах связи, в сфере навигации и т.д.) и идет расширение используемого частотного диапазона, то довольно актуальными можно считать проблемы защиты от последствий воздействий электромагнитных сигналов для широких полос частот.
Помимо технических аспектов таких вопросов есть и другие, например, экологические аспекты, они во многих случаях считаются как определяющие. Проведение разработки систем, связанных с защитой, экранированием и поглощением широкополосных ЭМИ представляет собой весьма сложную задачу относительно теоретических, и практических точек зрения.
Предъявление жестких технических требований к подобным системам обуславливает необходимость в поиске сложных решений по задачам защит от ЭМИ, а также мер по защите информации, которая содержится в ЭМИ [1, 2]. Подобные решения содержат в себе применение не только лишь особенных материалов и покрытий, но и компонентов конструкций (строительные или технические), проведение учета по электродинамическим свойствам в окружающей среде и др.
За счет правильного учета того, как распространяются и распределяются радиоволны определяются возможности для использования защитных свойств каких-либо элементов в конструкциях.
Необходимость в дополнительном экранировании необходимо обосновать и рассмотреть лишь после того, как были исчерпаны рекомендации оптимальных компоновок конструкций. Требуется отметить, что электромагнитные экраны помимо выполнения основных функций перераспределяют электромагнитные поля во внутренних областях объектов.
Разница среди собственно материалами (РПМ) и покрытиями (РПП) в определенной мере условна и предполагают, что материалы будут входить в состав конструкций объектов, а покрытия – как правило, наносят на поверхности объектов.
Условность такого разделения определяется тем обстоятельством, что любые радиопоглощающие материалы являются не только материалами, но микроволновыми устройствами-поглотителями.
Способности материалов к поглощению высокочастотного излучения зависят от их состава и структур. РПМ и РПП не позволяют обеспечить поглощение излучений любых частот, напротив, материалы определенных составов характеризуется лучшими поглощающими способностями при определенных длинах волн. Нет универсальных поглощающих материалов, приспособленных для поглощения излучений радиолокационных станций (РЛС) во всех частотных диапазонах.
Проведение классификации типов РПМ и РПП является достаточно условной. Можно указать, по крайней мере три вида РПМ: резонансные, нерезонансные магнитные и нерезонансные объёмные материалы.
За счет резонансных или частотнонастроенных РПМ происходит обеспечение частичной или полной нейтрализации отраженных от поверхностей поглотителей излучений частями их, прошедших по толщинам материалов. Эффекты нейтрализации значительны при толщинах поглотителей, равным одной четверти длин волны излучений. В таких случаях, отраженные поверхностями поглотителей волн будут находиться «в противофазах».
Резонансные материалы наносят по отражающим поверхностям объектом маскировки. Толщины РПМ будут соответствовать четверти длин волн, которые излучает РЛС.
Падающая энергия в высокочастотном излучении отражается от внешних и внутренних поверхностей РПМ, при этом образуется интерференционная картина нейтрализации исходных волн.
Как результат идет подавление падающего излучения. Вследствие того, что отклоняется ожидаемая частота излучения от значения расчётной происходит ухудшение поглощающих характеристик, в этой связи этот вид РПМ является эффективным при процессах маскировки от излучений РЛС, которая работает на стандартных, неизменяемых моночастотах.
В нерезонансных магнитных РПМ содержатся частицы феррита, которые распределены в эпоксидных пластиках или в покрытиях. Нерезонансными магнитными РПМ рассеивается энергия высокочастотных излучений по большим поверхностям. Основным преимуществом нерезонансных магнитных РПМ можно считать их широкополосность – эффективность поглощения излучений для широкого диапазона частот.
Эффективность резонансных РПМ имеет ограничение по узкому диапазону расчётных частот в излучении.
Применение нерезонансных объёмных РПМ идет большей частью как относительно толстые слои, поглощающие большую часть получаемой энергии до того как подходит возможное отражение волн от металлических задних пластин.
Принципы работы основываются на применении как диэлектрических, так и магнитных потерь, причем последние – вследствие того, что добавляются соединения феррита. Для определенных случаев применяют введение графита в пенополиуретановые матрицы.
Активное использование электромагнитных поглотителей на практике, потребовало от исследователей поиска оптимальных решений на основе известных алгоритмов.
С точки зрения идеала оптимальным будет поглотитель с небольшой толщиной, легкий, имеющий небольшой вес и широкополосный.
Но мы понимаем, что функции, заложенные в нем, будут по своей сути противоречивы.
Так, мы можем спроектировать поглотитель, имеющий высокое значение коэффициента поглощения, однако по толщине или весу он нас не устроит. Также для тонкого и легкого поглотителя может получиться большой коэффициент отражения.
В результате, в таких случаях создания поглотителей, исследователям приходится заниматься многими задачами, в которых происходит поиск определенного компромисса среди конфликтующих целей.
Поэтому, если вместо одного решения существует множество оптимальных решений, проектировщики могут сделать выбор лучших компромиссов для каждого конкретного случая. Такой набор оптимальных решений называют Парето решением в литературе, посвященной оптимизационным процессам. Уже многие авторы занимались поиском Парето-оптимального решения, правда при этом привлекались генетические алгоритмы [1, 2].
Кроме того, ученые проводили расчеты для метода роя частиц как эффективного алгоритма оптимизации для разных задач проектирования электродинамических объектов.
Для каждой из частиц существует адаптивная скорость. Также, каждая из частиц имеет память, вспоминает лучшие позиции для поискового пространства, в котором когда-либо они были.
Частицы стремятся к полету к лучшему поисковому району в течение поисковых процессов.
То есть, их движение является совокупным ускорением в направлении улучшения поиска решения [3, 4].
Будем полагать, что мы рассматриваем D-мерное пространство поиска, и i-ю частицу роя можем представить в виде D-мерного вектора Xi = (xi1, xi2, . . . , xiD)Т.
Скорости такой частицы представляю другим D-мерным вектором Vi = (vi1, vi2, …, viD)Т.
Для лучшего опыта i-й частицы (Pbest) имеем обозначение Pi =(pi1, pi2, . . . , piD)Т.
Парето-оптимальность: вектор позиции x* ∈ F является Парето-оптимальным, если там не существует позиции вектора, х ≠ х*∈ F, который доминирует.
Парето-оптимальное множество: множество всех Парето-оптимальных векторов, которые формируют Парето-оптимальное множество.
Парето-фронт: все объективные векторы, которые соответствуют положениям векторов Парето-оптимального набора.
Первый шаг в реализации нашего алгоритма оптимизации – это минимизация расстояния между растворами и фронта Парето.
Для этой цели должны быть определены соответствующие фитнес-функции. Традиционным типом присвоения фитнес-функции агрегирования является применение подхода, где фитнес-функция является взвешенной суммой ограничительных функций.
Но такой классический подход может оказаться весьма чувствительным к точному агрегированию целей и, во многих случаях, будет малоэффективным, в этой связи некоторыми исследователями было предложено применять весьма сложные методы [5–8], например нейронную сеть для получения оптимальных весов целевой функции.
Основные шаги нашего алгоритма действуют таким образом. После того как провели инициализацию популяции и архива, мы генерируем гиперкубы для пространства поиска, и обнаруживаем частицы на основе таких гиперкубов, системы координате каждой частицы определяют в соответствии со значениями своих целевых функций.
В тех гиперкубах, которые имеют более одной частицы назначаем фитнес-функцию, равную результату деления любого числа x > 1 (мы выбрали его равным 10) на число частиц, которые они содержат.
Такая работа связана со снижением фитнес-функции гиперкубов, которые содержат больше частиц и может рассматриваться как форма обобщения фитнеса. Потом мы используем случайный выбор, делаем выделение с помощью этих фитнес-значений для выбора гиперкубов, из которых мы примем соответствующие частицы.
На рис. 1 приведена схема исследуемого нами многослойного поглотителя. В таблице указаны вычисленные данные по материалу. На рис. 2 Приведена блок-схема алгоритма.
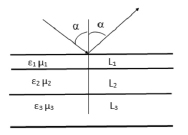
Рис. 1. Схема многослойного поглотителя
Далее приведем результаты моделирования.
В приведенных в таблице данных сформирован поглощающий материал, который имеет максимальное поглощение для частоты 908 МГц.
Поглощающие материалы можно применять в метало-диэлектрических антеннах [9].
Данные по поглощающему материалу
|
ε1, μ1, L1 |
ε2, μ2, L2 |
ε3, μ3, L3 |
|
1+j•8 32+j•11 0.123 мм |
1+j•0 10+j•2 0.137 мм |
1+j•2 2+j•9 0.142 мм |
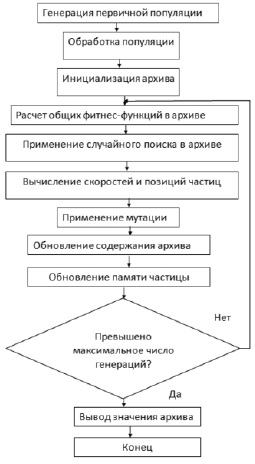
Рис. 2. Блок-схема алгоритма