

На протяжении многих десятилетий ученые и инженеры используют новые технологии трехмерного (3D) зондирования и визуализации изображений реальных объектов. В отличие от традиционных методов двумерной (2D) визуализации, технологии 3D-визуализации могут существенно захватывать 3D-структуру, диапазон и текстурную информацию объектов. Кроме того, технологии 3D-визуализации устойчивы к частичной окклюзии сцены. Существует множество технологий 3D-визуализации, таких как голография и связанные с ней методы интерферометрии, стереоскопия, методы подсветки рисунков и методы времени полета.
Мультиперспективная 3D-визуализация получатся по записи обычных 2D некогерентных изображений из нескольких представлений. Так как используется стандартные 2D изображения, мультиперспективного 3D системы визуализации могут быть построены, используя один недорогой фотоаппарат или массив недорогих тепловизоров.
В 1908 году Липпман предложил новую технику, названную интегральной съемкой (ИС), которая может реконструировать истинные 3D-изображения, которые можно наблюдать с полным параллаксом и квази-непрерывными углами обзора. Этот метод, который основан на принципе обратимости световых лучей, производит автостереоскопические изображения. Таким образом, для восприятия 3D-изображений не требуется никаких специальных устройств просмотра. Помимо раннего наблюдения за ИС Липпманна [1], на протяжении большей части 20-го века не было никакой существенной деятельности в этой области. В настоящее время, благодаря прогрессу в информационных технологиях: в области оптико-электронных датчиков, таких как CMOS и CCDs, устройства отображения, такие как ЖК-дисплеи, и коммерчески доступные цифровые компьютеры, принципы ИС были недавно восстановлены и получили дальнейшее развитие.
Интегральное воображение было исследовано для воспринятия, захвата, и визуализирования 3D предметов используя современные оптические и цифровые приборы и различные методы формирования изображения [2]. Многочисленные результаты исследований были достигнуты, в том числе в телевидении [3], автоматическом распознавании целей [4], в формировании трехмерного фотонного изображения [6], 3D-подводное изображение [5], медицинская визуализация [7] и другие.
1. История развития и принципы интегральной визуализации
Типичный процесс 3D-визуализации может включать ряд этапов, таких как захват изображения, цифровая обработка и, наконец, этап отображения. Зрительная система человека воспринимает 3D-информацию из того, что можно назвать глубиной сигнала. Среди них, бинокулярная диспаратность, или стереопсис, является наиболее решающим. Стереопсис могут быть получены от параллакса между сетчаткой получаются изображения с разными перспективами для обоих глаз.
Стереоскопическая технология отображения 3D основана на использовании специальных очков, которые индуцируют бинокулярное неравенство, предоставляя различное изображение каждому глазу наблюдателя. Первое предложение в этом смысле датируется 1853 годом, когда Роллман предложил использовать очки-глифы [8]. В таких случаях стереоскопическая информация кодируется в два взаимодополняющих цвета. Этот метод до сих пор широко используется благодаря своей простоте и низкой цене. Однако он плохо воспроизводит цвета и очень чувствителен к хроматическим аномалиям наблюдателя. В более позднем подходе используется временное мультиплексирование левого и правого изображений с помощью смотровых стекол, выполненных жидким кристаллом с затвором [9]. Другие стереоскопические методы основаны на использовании поляризованных кристаллов для индуцирования бинокулярного неравенства. В этом случае левый и правый изображения излучаются с ортогональными поляризациями [10].
Среди методов, которые предоставляют автостереоскопические изображения, наиболее увлекательной и элегантной является голография. Но голография требует когерентного освещения. Голографические методы не готовы к коммерческим 3D-дисплеям в ближайшем будущем [11]. Аутостереоскопические методы, которые достигли большего развития до сих пор, являются теми, в которых монитор сам реализует функцию отправки соответствующих изображений на левый и правый глаза. Среди этих методов наиболее известным является использование линзовидного листа [12], который представляет собой массив плоско-цилиндрических линз, отпечатанных на прозрачной панели для проецирования стереоскопического изображения (рисунок).
Этап захвата изображения в ИС
Основным недостатком этого метода является то, что она обеспечивает только бинокулярный параллакс для одного положения наблюдателя и для уникальной перспективы. Другой альтернативный подход этой концепции заключается в использовании параллаксных барьеров, которые представляют собой массивы вертикальных уплотнений, которые позволяют взгляду, показанному на левом глазу, отличаться от вида на правом глазу [13]. Основным недостатком параллаксных барьеров является их оптические потери.
Для данного метода существует проблема конфликта между аккомодацией глаз и конвергенции зрительных осей. Такое неравенство стимулирует движения сходимости осей глаз, чтобы позволить слияние и воспринимать глубину. Такой вид конвергенции создает напряжение аккомодации, чтобы позволить глазам сосредоточиться на более близкой сцене. Это несоответствие вынуждает зрительную систему идти против природы. В результате, люди чувствуют усталость и, иногда, сильные чувства дискомфорта [14].
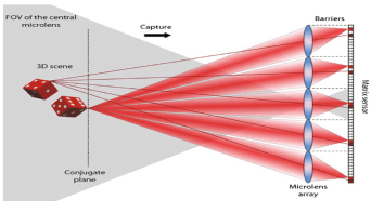
2. Этап зондирования интегральной визуализации
Если 3D-сцена находится далеко от камеры, угловое расширение, такие линзы, как видно из рисунка, невелика. В этом случае объектив камеры, также назван глубина-контроль объектив, необходимо, чтобы изображения на плоскости дальнего 3D-сцены на ОМС. В этом случае некоторые части 3D-сцены изображены в ОМС, и другие части изображены за ОМС.
Угловое разрешение, или емкость сегментации 3D-реконструкции, ограничено числом пикселей на ЭИ. Чтобы гарантировать хорошее пространственное разрешение в реконструированных участках 3D-сцены, требуется большое количество малых микролинз. Из захваченного ЭИ, можно рассчитать так называемый подызображения или просматривайте изображения, извлекая и составляя пиксели в одном и том же локальном положении в каждом ЭИ. Любой фрагмент видит другой точки зрения сцены и имеет высокую глубину резкости, которая соответствует изображениям, полученным с помощью небольших диафрагм. Количество пикселей этих подызображений просто равно числу микролинз массива.
Прямой порядок раскладки очень полезен, потому что он позволяет фиксировать ЭИ с использованием только одного датчика и одного снимка. Полученный параллакс определяется углом, подрезанным объективом камеры, как видно из центра сцены. Объединенные изображения, захваченные этой процедурой могут быть очень полезны для реконструкции глубины далеких сцен с хорошей оптически емкостью сегментации. Кроме того, поскольку FInI камеры фиксируют сцены, которые находятся в близком соседстве ОМС, полученные ЭИ готовы для прямого отображения в неотъемлемой монитор визуализации.
В системах интегральной визуализации достижимое разрешение ограничено размером и количеством пикселей. По сути, разрешение каждого ЭИ ограничено по трем параметрам: Размером пикселя, функции точки распространения, и глубиной резкости [6]. Кроме того, аберрации и дифракции являются существенными.
Интегральное изображение может быть выполнено либо в режиме синтетической апертуры, либо с массивом датчиков изображения с высоким разрешением. Каждое изображение может быть записано полный размер или датчиком в несколько мегапикселей Сверх того, вместо блока датчика, одиночный датчик может перевести на 2D плоскости для того чтобы захватить множественные 2D изображения. Такой подход можно считать синтезированной апертурой интегральной томографии (САИТ). САИТ позволяет получить больший угол обзора, высоким разрешением 2D-изображения, потому что каждый 2D-изображения в полной мере использует блок детектора и оптической апертуры. Кроме того, САИТ потенциально создает большие отверстия пикап, который гораздо больше, чем то, что является практичным с обычными массивами на основе интегральной обработки изображений. Большие отверстия важны для получения требуемого разрешения на диапазон больше. Следует отметить, что этот метод может не подойти для динамичных сцен.
Замечательная разработка многоракурсной 3D-визуализации в течение прошедшего десятилетия и достижения высококачественной 2D-визуализации/устройства отображения информации имеют преимущества, которые заключаются в ее простоте и способности реконструировать 3D-изображения без дорогостоящих устройств и требовательных условий.