

Выбор размеров элементов конструкции необходимо осуществлять на основании размеров ее элементов. Наиболее габаритным элементом конструкции магнитострикционного преобразователя линейных перемещений является волновод. Он оказывает существенное влияние на длину устройства. Оценка ширины устройства возможна на основании разработанного авторами метода определения рекомендуемого расстояния от постоянного магнита до волновода. Для объяснения способа выбора одного из параметров, а именно ширины, рассмотрим метод расчета возможного и оптимального расстояния от волновода до постоянного магнита.
Известно, что токовые импульсы, сформированные генератором блока формирования входного сигнала, поступают в среду волновода, где распространяясь, создают в соответствии с рис. 1, вокруг волновода магнитное поле напряженностью  . Проекция напряженности магнитного поля волновода Himp будет зависеть от его размеров и удаленности от его центра. Формулы расчета значения Himp являются известными из курса физики и могут быть позаимствованы из справочной литературы, например, из [1].
. Проекция напряженности магнитного поля волновода Himp будет зависеть от его размеров и удаленности от его центра. Формулы расчета значения Himp являются известными из курса физики и могут быть позаимствованы из справочной литературы, например, из [1].
Так, на поверхности волновода и за его пределами, то есть на расстоянии, равном радиусу волновода RB, проекция напряженности магнитного поля, созданного токовыми импульсами Himp определится согласно выражению [1]
Himp =i/(2•π•RB), (1)
где i – амплитуда токовых импульсов.
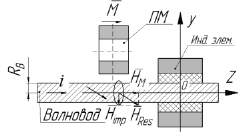
Рис. 1. Процессы, возникающие при трансляции токовых импульсов в среде волновода
Магнитное поле, созданное токовыми импульсами взаимодействует с полем, созданным постоянным магнитом (ПМ). Как уже упоминалось ранее, в магнитострикционных преобразователях перемещений наиболее часто используют сплошные и кольцевые постоянные магниты, а также постоянные магниты формы прямоугольного параллелепипеда. Напряженность магнитных полей, созданных постоянными магнитами указанных форм, а также вывод формул расчета подробно изложен в [2]. Так, для постоянного магнита формы прямоугольного параллелепипеда напряженность магнитного поля в точке наблюдения определится согласно выражению [2].
Таким образом, имея на этапе разработки магнитострикционных преобразователей перемещений (МПП) информацию о свойствах и параметрах магнита, используя формулы, приведенные в [2], можно рассчитать напряженность в любой точке наблюдения, удаленной на расстояние R1 от центра ПМ.
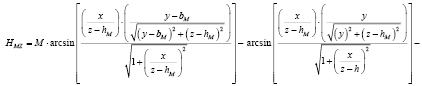
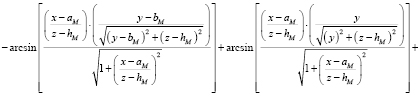
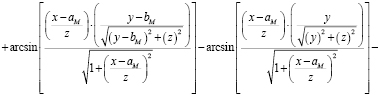
 , (2)
, (2)
где HMZ – проекция напряженности магнитного поля ПМ на ось 0Z; M – намагниченность магнита; aM , bM , hM – длина, ширина и высота постоянного магнита соответственно; x,y,z – координаты точки наблюдения относительно центра ПМ.
В результате взаимодействия магнитных полей, созданных постоянным магнитом и токовым импульсом, т.е. HMZ и Himp ,происходит формирование результирующего магнитного поля напряженностью  Res (рис. 1), значение которого можно определить по принципу суперпозиций:
Res (рис. 1), значение которого можно определить по принципу суперпозиций:
(HRes)2=(Himp)2+(HMZ)2 (3)
Используя выражения (1)–(3) можно определить значение результирующей напряженности магнитного поля в любой точке наблюдения.
Одной из трудностей, возникающих при анализе измерительных каналов МПП, является выбор значения результирующей напряженности магнитного поля на поверхности волновода. Это значение согласно [3, 4, 5] должно выбираться в диапазоне H1 ≤ HRes ≤ HS (рис. 2а), где H1 и HS – напряженности магнитного поля на краях линейного участка кривой J=f(H), HS – напряженность технического насыщения.
Необходимо отметить, что кривая намагничивания материала волновода J=f(H), изображенная на рис. 2а, зависит от его предыстории и может использоваться для расчетов в случае, если волновод не находился в состоянии насыщения. В остальных случаях выбор значений напряженностей H1 и HS необходимо выполнять в соответствии со статической петлей гистерезиса, изображенной на рис. 2б.
Отсутствие справочных данных и способов расчета значений напряженностей магнитного поля H1 и HS, а также отсутствие рекомендуемого значения результирующей напряженности магнитного поля HRR, представляет проблему, с которой приходится сталкиваться при расчете значения результирующей напряженности магнитного поля и анализе измерительных каналов МПП в целом.
а б
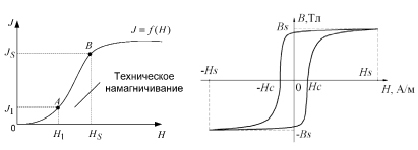
Рис. 2. Свойства материала волновода: а – характеристическая кривая намагничивания не находившегося в состоянии насыщения; б – статическая петля гистерезиса
Так как, согласно рис. 2б, рекомендуемое значение результирующей напряженности магнитного поля HRR в среде волновода должно быть в интервале HC ≤ HRR ≤ HS , то для разрабатываемых конструкций МПП рекомендуемое значение результирующей напряженности HRR предлагается рассчитывать по формуле:
HRR=(HС+BS / μμ0)/2, (4)
где HС – коэрцитивная сила материала волновода; HS =BS / μμ0 – напряженность насыщения материала волновода; BS – индукция насыщения; μ – магнитная проницаемость; μ0 – магнитная постоянная; HС, BS и μ – являются справочными величинами [5].
Таким образом, для расчета одного из параметров, а именно ширины магнитострикционного преобразователя необходимо выполнить следующие действия:
1. Задать параметры постоянных магнитов и волноводов;
2. Справочно определить значения величин HС, BS и μ.
3. По формуле (3) рассчитать рекомендуемое значение результирующей напряженности магнитного поля HRR .
4. По формулам (1), (2) и (3) рассчитать рекомендуемое значение расстояния от центра ПМ до центра волновода.
5. Рассчитать ширину и высоту корпуса.
Подобный расчет на этапе проектирования подобных устройств, позволяет более точно определить габариты корпуса разрабатываемого МПП и снизить затраты на изготовление как прототипа МПП, так и их серийного выпуска.