

Погрешность наведения лазерного пучка на объект и погрешность взаимной выставки осей каналов лазерных локационных систем должны составлять единицы угловых секунд [5]. Одним из методов обеспечения соосности каналов многоканальных оптических систем является использование системы автоюстировки, позволяющей стабилизировать в заданных пределах угловое положение оси диаграммы направленности пучка излучения рабочего лазера, относительно базового положения оси приемного канала [2].
Устройство сопряжения осей (УСО) пучков излучения выполняет две функции: пространственное совмещение пучков излучения рабочего лазера и маркерного источника и отвод части излучения пучков в канал оптической системы устройства союстировки осей.
УСО состоит из плоскопараллельной пластины, зеркального объектива, построенного по системе Кассегрена, и приемного узла, состоящего из матричных фотоприемных устройств (ФПУ) ИК и видимого диапазонов спектра со светоделителем (см. рис. 1).
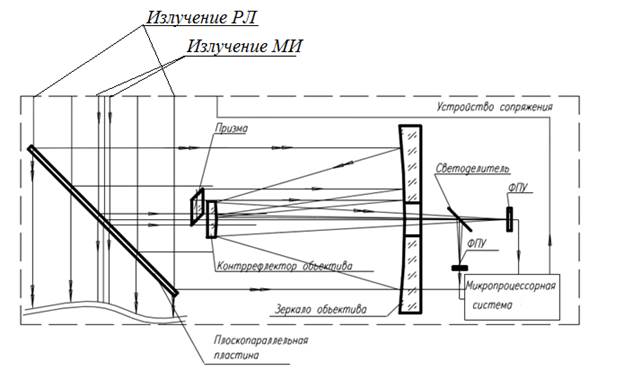
Рисунок 1 - Функциональная схема устройства сопряжения осей [3]
В УСО основным критерием качества является точность измерения угловых координат оптических осей пучков лазерного излучения [4]. Для оценки положения центра пятна рассеяния излучения рабочего лазера и маркерного источника могут быть использованы два метода: энергетического центра тяжести (ЭЦТ) и максимума отношения правдоподобия (МОП). Чтобы выбрать один из этих методов, нужно провести анализ методологической погрешности каждого метода.
Методическая погрешность обусловлена несовершенством метода измерений, влиянием выбранного средства измерений на измеряемые параметры сигналов, некорректностью алгоритмов или расчетных формул, по которым производят вычисления, округлением результатов, отличием принятой модели объекта измерений от той, которая правильно описывает его свойство, определяемое путем измерения.
Отличительной особенностью методических погрешностей является то, что они не могут быть указаны в нормативно-технической документации на используемое средство измерений, поскольку от него не зависят, а должны определяться оператором в каждом конкретном случае. В связи с этим оператор должен четко различать фактически измеренную им величину и величину, подлежащую измерению. Методическую погрешность можно уменьшить путем применения более точного метода измерения.
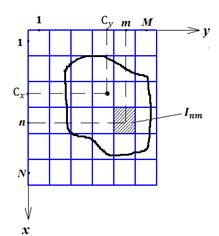
Точность измерения зависит от точности определения координат энергетических центров тяжести изображений (см. рис. 2) на ФПУ.
 – координаты центра тяжести распределения интенсивности в изображении на ПЗС - матрице;
– координаты центра тяжести распределения интенсивности в изображении на ПЗС - матрице;  – величина сигнала в пикселе с координатами n, m; N, M–число столбцов и строк матрицы; n, m–порядковые номера пикселей по столбцам и строкам матрицы
– величина сигнала в пикселе с координатами n, m; N, M–число столбцов и строк матрицы; n, m–порядковые номера пикселей по столбцам и строкам матрицы
Рисунок 2 - Распределение интенсивности излучения на ПЗС – матрице
Метод энергетического центра тяжести (ЭЦТ)
Необходимо задать распределение Гаусса со смещением  относительно середины пикселя, которое бы описывала нам в дальнейших вычислениях распределение пятна рассеяния по пикселям в матрице.
относительно середины пикселя, которое бы описывала нам в дальнейших вычислениях распределение пятна рассеяния по пикселям в матрице.

где  – радиус рассеяния проекции изображения.
– радиус рассеяния проекции изображения.
Координаты (в пикселях) центра тяжести распределения интенсивности в изображении на ПЗС - матрице определяются [6]:
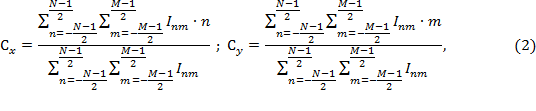
где – величина сигнала в пикселе с координатами n, m;
N, M–число столбцов и строк матрицы;
n, m–порядковые номера пикселей по столбцам и строкам матрицы.
Истинное смещение центра пятна рассеяния относительно центра пикселя матрицы будет определяться следующей формулой:
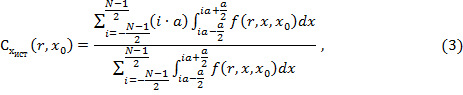
где а – размер пикселя матрицы.
Итоговая погрешность оценки положения пятна рассеяния будет определяться как разность вычисленного по формуле (3) истинного смещения пятна рассения и заданного значения 

Ниже приведены графики, полученные с использованием формул (1) – (4).
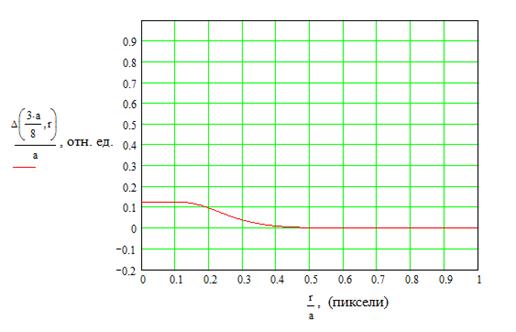
Рисунок 3 - Итоговое значение погрешности оценки положения центра пятна рассеяния при заданном смещении  при
при 
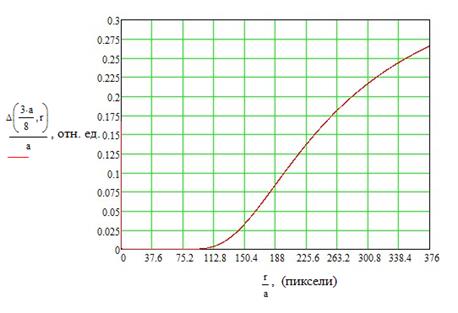
Рисунок 4 - Итоговое значение погрешности оценки положения центра пятна рассеяния при заданном смещении при 
Метод максимума отношения правдоподобия (МОП)
Интенсивность  светового потока, падающего на пиксель
светового потока, падающего на пиксель  определяется выражением [1]:
определяется выражением [1]:

где  - пространственная функция распределения интенсивности падающего на фотоприемник падающего потока, которая равна:
- пространственная функция распределения интенсивности падающего на фотоприемник падающего потока, которая равна:

где  – интенсивность помех на единицу площади фотоприемника;
– интенсивность помех на единицу площади фотоприемника;
 – плотность энергии светового потока от полезного сигнала.
– плотность энергии светового потока от полезного сигнала.

где  - функция, определяющая пространственный характер распределения мощности энергии сигнала.
- функция, определяющая пространственный характер распределения мощности энергии сигнала.
В случае небольшого отклонения лучей от оптической оси пространственная плотность распределения энергии падающего сигнала описывается нормальной кривой Гаусса:

где – радиус рассеяния проекции изображения;

 – координаты проекции источника излучения при прохождении лучей через оптическую систему.
– координаты проекции источника излучения при прохождении лучей через оптическую систему.
Согласно [7], оценка дисперсии погрешности определения координат центра проекции методом МОП :

где  - время накопления.
- время накопления.
При моделировании были приняты следующие значения параметров:
·  = 100 квантов АЦП /с;
= 100 квантов АЦП /с;
· = 20 квантов АЦП / пискель·с;
· = 20 мс.
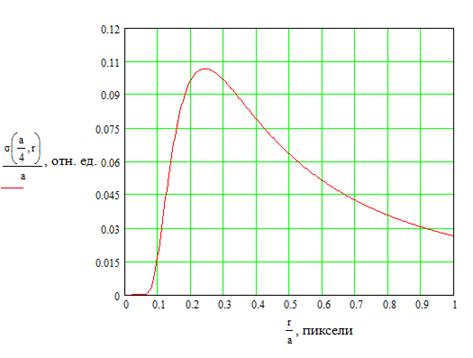
Рисунок 5 - Итоговое значение CКО (в пикселях) оценки положения центра пятна рассеяния при заданном смещении  при
при
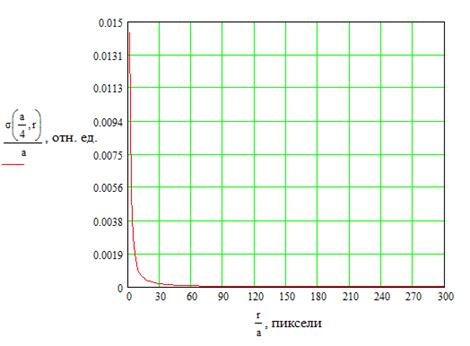
Рисунок 6 - Итоговое значение CКО (в пикселях) оценки положения центра пятна рассеяния при заданном смещении при 
Заключение
Проанализированы методические погрешности:
· Метод ЭЦТ: с увеличением размера  пятна рассеяния при
пятна рассеяния при  погрешность оценки положения центра пятна рассеяния уменьшается. Максимальное значение погрешности
погрешность оценки положения центра пятна рассеяния уменьшается. Максимальное значение погрешности  . При
. При  погрешность оценки положения центра пятна рассеяния минимальна
погрешность оценки положения центра пятна рассеяния минимальна  . При
. При  погрешность увеличивается в связи с тем, что размер пятна рассеяния превышает размер матрицы.
погрешность увеличивается в связи с тем, что размер пятна рассеяния превышает размер матрицы.
· Метод МОП: максимальное значение СКО  оценки положения центра пятна рассеяния достигается при
оценки положения центра пятна рассеяния достигается при  С увеличением размера пятна рассеяния при
С увеличением размера пятна рассеяния при  значение СКО оценки положения центра пятна рассеяния уменьшается.
значение СКО оценки положения центра пятна рассеяния уменьшается.