

Исследование устойчивости нелинейных систем рассмотрим на примере модели простого маятника, так как уравнения маятника имеют важное практическое значение. Поведение некоторых не связанных непосредственно с маятником физических систем может моделироваться с использованием математической модели, похожей на уравнение маятника. Примером такой системы может служить модель синхронного генератора, соединенного бесконечной шиной.
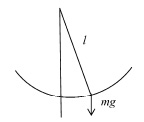
Рис. 1
Пусть l – длина стержня, m – масса груза. Предположим, что стержень абсолютно твердый и имеет нулевую массу. Пусть j – угол отклонения стержня от вертикальной оси, проходящей через точку подвеса. Маятник свободно качается в вертикальной плоскости, и груз маятника совершает круговое движение с радиусом l. Для записи уравнения движения маятника определим силы, действующие на маятник. В первую очередь это сила тяжести mg , где g – гравитационная постоянная. Имеется также сила трения, препятствующая движению, которую будем полагать пропорциональной скорости вращения (коэффициент пропорциональности k). Используя второй закон Ньютона получаем уравнение движения маятника для продольного движения:
 .
.
Обозначив в качестве переменных  и
и  , запишем уравнения состояния в следующем виде:
, запишем уравнения состояния в следующем виде:
 (1)
(1)
Для нахождения точки равновесия положим

и решим систему уравнений

относительно х и у. С физической точки зрения маятник имеет только два положения равновесия (0; 0) и (π; 0), которые существенно отличаются друг от друга. Маятник может легко установиться в нижнем положении равновесия (0; 0) и не может удерживаться в верхнем положении (π; 0), так как любое малое возмущение выведет его из этого состояния. Отличие этих дух состояний заключается в различных свойствах устойчивости, присущих этим состояниям.
Рассмотрим метод исследования на устойчивость системы (1) с помощью построения фазового портрета в математическом пакете Maple. При этом будем пользоваться понятиями устойчивости и асимптотической устойчивости по Ляпунову, введенные в [1, с. 152]. Будем так же пользоваться классификацией точек покоя, приведённой в [1, с. 155-157].
Рассмотрим частный случай системы (1) при  . Фазовый портрет этой системы получен с помощью компьютерного моделирования. Ниже приводятся расчеты, произведенные в математическом пакете Maple (рис. 2).
. Фазовый портрет этой системы получен с помощью компьютерного моделирования. Ниже приводятся расчеты, произведенные в математическом пакете Maple (рис. 2).
Анализируя полученный фазовый портрет, можно сделать следующие выводы:
1. Характерные особенности качественного поведения рассматриваемой системы могут быть изучены в полосе  в силу периодичности по х с периодом 2π;
в силу периодичности по х с периодом 2π;
2. Траектории в окрестности точек равновесия (0, 0), (2π, 0) и (–2π, 0) и т.д. демонстрируют качественное поведение, характерное для траекторий в окрестности устойчивого узла;
3. Траектории в окрестности точек равновесия (π, 0) и (-π, 0) и т.д. демонстрируют качественное поведение, характерное для траекторий в окрестности седловой точки.
Таким образом, фазовые портреты, полученные в рассматриваемом примере, показывают, что качественное поведение в окрестности каждой точки равновесия похоже на качественное поведение, которое наблюдается при исследовании линейных систем [1, с. 155-157].
Такое поведение вблизи точек равновесия может быть обнаружено без построения фазовых портретов исследуемой нелинейной системы. Качественное поведение системы (1) может быть определено посредством её линеаризации в окрестности точек равновесия [2, с.53-57]. Соответствующие расчёты для нахождения собственных чисел якобиана, вычисленного в точках (0, 0) и (π, 0), выполнены в математическом пакете Maple (рис. 3).
Так как в точке равновесия (0, 0) якобиан имеет собственные числа
 ,
,
то эта точка является устойчивым фокусом. В точке (π, 0) собственные числа якобиана равны
 .
.
Поэтому (π, 0) – седловая точка.
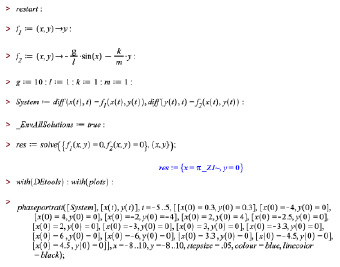
Рис. 2
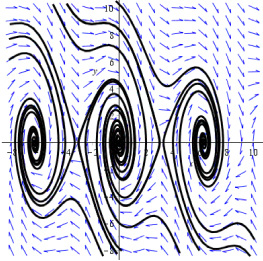
Рис. 3
Таким образом, качественное исследование точек равновесия простого маятника может быть проведено с помощью построения фазового портрета и с использованием соответствующей линеаризованной модели.