

Среди простейших плоских кулачковых механизмов как вполне пригодный для использования приводится механизм с двумя роликами, показанный на рис. 1. В таком механизме подвижных звеньев два, число кинематических пар пятого класса две и число кинематических пар четвертого класса также две, т.е. n=2, p5=2 и p4=2. Развернутая формула Чебышева П.Л.
W = 3n – 2p5 – p4.
при этом дает подвижность механизма равную нулю W=0, т.е. механизм работает лишь благодаря тому, что между кулачком и роликами поочередно присутствует зазор. Эта ситуация при двух высших парах может быть исполнена лишь введением в состав механизма дополнительного промежуточного звена.
Недостатком такого механизма является невозможность регулирования угла и расстояния между опорами промежуточного звена, и, следовательно, невозможность регулирования закона движения толкателя. С целью решения этой проблемы предложен кулачковый механизм [1] (рис. 2), обеспечивающий возможность регулирования угла и расстояния между опорами промежуточного звена за счет клеммовых соединений, что позволит управлять законом движения толкателя.
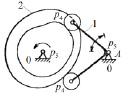
Рис. 1. Двухдисковый кулачковый механизм

Рис. 2. Кулачковый механизм с изменяемым промежуточным звеном
Для проверки работоспособности конструкции в системе T-Flex «Динамика» создана трехмерная модель кулачкового механизма и проведен её динамический анализ, по результатам которого построены графики зависимости перемещения S толкателя от угла поворота φ кулачка. В силу того, что новая конструкция кулачкового механизма содержит в своем составе клеммовые соединения, позволяющие изменять геометрию промежуточного звена, становится возможным изменять закон движения толкателя. В качестве примера на рис/ 3 показаны кулачковые механизмы с различной геометрией промежуточного звена и соответствующие графики перемещения толкателя.
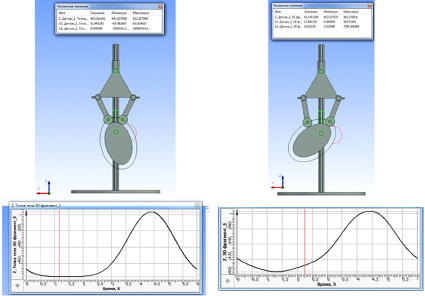
Рис. 3. Результаты анализа нового кулачкового механизма
Проведенный вычислительный эксперимент показал, что в таком механизме наличие клеммовых соединений позволяет достаточно простыми средствами изменять геометрию промежуточного звена, а, следовательно, осуществлять регулирование закона движения толкателя.