

Туберкулез костей и суставов - наиболее распространенная форма хирургического туберкулеза. Процесс может развиться во всех костях и суставах, но чаще он наблюдается в позвонках и крупных суставах: тазобедренном, коленном, плечевом, локтевом и лучезапястном.
В настоящее время существует большое количество способов первичной стабилизации поврежденного сегмента позвоночника: транспедикулярная фиксация, передние, задние и комбинация передних и задних методик.Сегодня наиболее приемлемым оперативным вмешательством на поврежденном отделе позвоночника является сочетание заднего спондилодеза и переднего корпородеза с применением современных металлических конструкций [1]. Совершенно ясно, что при выполнении такой внутренней фиксации удается добиться наилучшей стабилизации поврежденного сегмента позвоночника.
Тем не менее у этих процедур есть явный недостаток, который заключается в том, что таким способом восстанавливается только опорная функция, а биомеханическая функция безвозвратно утрачивается. Также другим негативным фактором является то, что врачи не могут узнать точные размеры необходимого имплантата до операции, поэтому подбор имплантата производится прямо во время операции, пока пациент находится под воздействием анестезии.
Исходя из этого было предложено моделировать имплантаты заранее на основе снимков пациента, полученных с компьютерного томографа и использовать технологию быстрого прототипирования для их изготовления.
Важным моментом является способ последующей фиксации полученного имплантата. Если фиксация будет ненадёжной под действием нагрузок может произойти смещение имплантата, что повлечёт за собой травмы внутренних органов. Для предотвращения такогоисхода событий необходимо добавить на модель имплантата каналы под спонгиозные винты, рассчитанные под конкретного пациента для наилучшей фиксации.
Цель исследования
Разработать алгоритм математического описания положения спонгиозных винтов на заготовке имплантата позвонка, построенного на основе снимков компьютерного томографа для последующейпечати с использованием технологии быстрого прототипирования.
Материал и методы исследования
Основой для проведения исследованияявляется набор снимков компьютерной томографии пациента и заготовка имплантата созданная с использованием программного продукта AutoCAD.
Алгоритм состоит из следующих шагов:
1. Первым шагом стоит выделение поврежденного сегмента позвоночника. Для выполнения задачи был использован программный продукт MeVisLab [2];
2. Следующим шагом необходимо произвести сегментацию изображения для облегчения последующего анализа;
3. Далее производится определение координат точек входа винтов у остистых отростков;
4. Следующим шагом производится расчёт координат окончания каналов под спонгиозные винты;
5. Последним этапом производится объединение заготовки с пластиной для последующей фиксации и добавление каналов под спонгиозные винты.
Расчёт положения каналов под спонгиозные винты
Тело модели состоит из трёх параллельных поверхностей: краниальной; медиальной и каудальной.
Схема полученных поверхностей в 3D-проекции представлена на рисунке 1.
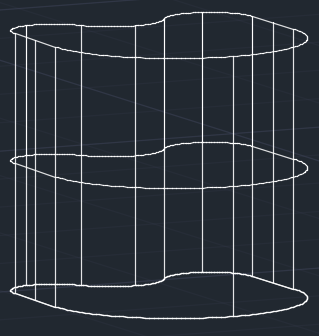
Рисунок 1– Схема модели в 3D-проекции
После построения заготовки необходимо создать каналы для последующей фиксации имплантата при помощи спонгиозных винтов. Для этого нам необходимо рассчитать две координаты для каждого из винтов:
а) точкувхода винта у остистого отростка;
б) точку окончания канала под винт.
Для начала произведём расчёт точек входа в корень дуги для спонгиозных винтов. Для этого используются следующие анатомические ориентиры:
а) поперечный отросток, обычно соответствующий уровню корня дуги в поясничном отделе;
б) каудальная часть нижней суставной фасетки;
в) гребень в месте соединения суставного и поперечного отростков с пластинкой дуги.
Для расчёта, необходимо узнать следующие анатомические параметры: горизонтальный и вертикальный диаметры корня дуги; поперечный педикулярный угол между линией, параллельной середине позвонка, и линии оси корня дуги; сагиттальный педикулярный угол между линией оси корня дуги и верхней замыкательной пластинкой тела имплантата [3]. Данные параметры показаны на рисунке 2.
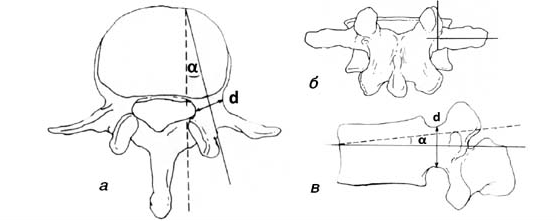
а) траектория установки винта в аксиальной плоскости;
б) проекция точки введения винта на задние отделы позвоночника;
в) траектория установки винта в сагиттальной плоскости.
Рисунок 2– Основные анатомические параметры
В процессе исследования было статистически установлено, что угол направления винта в грудном отделе позвоночника равен 30°.
Расчёт горизонтального диаметра корня дуги производится по снимкам компьютерного томографа. Но для автоматизации проведения замеров их необходимо подготовить.
Для обработки и анализа изображений применяется сегментация, т.е. разделение изображения на области, для которых выполняется определенный критерий однородности, например, выделение на изображении областей приблизительно одинаковой яркости. Понятие области изображения используется для определения связной группы элементов изображения, имеющих определенный общий признак (свойство).
Один из основных и простых способов — это построение сегментации с помощью порога. Порог — это признак (свойство), которое помогает разделить искомый сигнал на классы. Операция порогового разделения заключается в сопоставлении значения яркости каждого пикселя изображения с заданным значением порога [4].
В процессе исследования для сегментации изображения выбран метод Оцу
С помощью данного метода вычисляется порог t, минимизирующий среднюю ошибку сегментации, т.е. среднюю ошибку от принятия решения о принадлежности пикселей изображения объекту или фону. Значения яркостей пикселей изображения можно рассматривать как случайные величины, а их гистограмму – как оценку плотности распределения вероятностей. Если плотности распределения вероятностей известны, то можно определить оптимальный (в смысле минимума ошибки) порог для сегментации изображения на два класса с0 и c1 (объекты и фон) [5].
В дальнейших рассуждениях предполагаем, что:
¾ изображение представляется с помощью L уровней яркости;
¾ hi – число элементов изображения, имеющих яркость i, i = 0, 1, ..., L-1;
¾ H – общее число пикселей на изображении;
¾ гистограмма изображения является нормализованной и ее можно рассматривать как распределение вероятностей.
Общая формула вероятности
![]() . (1)
. (1)
Сумма всех вероятностей вычисляется по формуле
![]() (2)
(2)
Далее используется гистограмма распределения значений яркости пикселей растрового изображения. Гистограмма строится по значениям
![]() (3)
(3)
где N – это общее кол-во пикселей на изображении;
ni – это кол-во пикселей с уровнем яркости i.
Диапазон яркостей делится на два класса с помощью порогового значения уровня яркости k, k — целое значение от 0 до L. Каждому классу соответствуют относительные частоты ω0ω1 [4]
![]() (4)
(4)
![]() (5)
(5)
Средние уровни для каждого из двух классов изображения
![]() (6)
(6)
![]() (7)
(7)
Далее вычисляется максимальное значение оценки качества разделения изображения на две части
![]() (8)
(8)
где ![]() –
межклассовая дисперсия;
–
межклассовая дисперсия;
(σобщ)2 –общая дисперсия для всего изображения целиком.
После сегментации измеряем размер полученной области и получаем горизонтальный диаметр корня дуги. Таким же образом вычисляем вертикальный диаметр корня дуги и находим точку входа спонгиозных винтов. Повторяем все действия для противоположной стороны позвонка. В итоге получаем координаты точки пересечения двух диаметров.
Следующим шагом необходимо вычислить точку примерного окончания каналов под винты. Для этого в медиальной плоскости построим отрезок соединяющийсередину дуги образованной позвоночным отверстием с серединой дуги в передней части имплантата. Отложимот его центра ещё два отрезка к передней части имплантатапод углом в 45°.
Соединив середины полученных отрезов и середину дуги впередней части имплантата получим равнобедренный треугольник ABC.
По результатам статистических данных уровень окончания винтов примерно равен одной пятой от расстояния между медиальной и краниальной плоскостью. Созданная проекция этого треугольника на данный уровень представлена на рисунке 3. Полученные точки B и C и будут являться точками окончания каналов под спонгиозные винты.
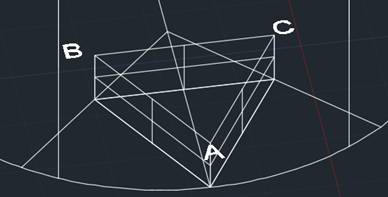
Рисунок 3– Полученный треугольник ABC
Пример последующей фиксации иплантата
В процессе работы был смоделирован способ последующей фиксации имплантата (рисунок 4-5).
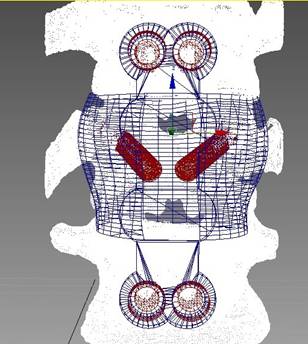
Рисунок 4 – пример фиксации имплантата
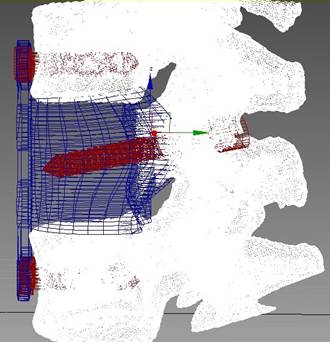
Рисунок 5 – пример фиксации имплантата
Выводы
Таким образом разработан алгоритм математического описания положения спонгиозных винтовна основе снимков компьютерного томографа. Проведен анализ предметной области и указаны недостатки современного способа проведения заднего спондилодеза и переднего корпородеза. В результате проделанной работы была получена модельпоследующей фиксации имплантата.