

Радиолучевые технические средства охраны (РЛ ТСО) активно используются для охраны периметров. Низкая стоимость и высокая помехоустойчивость делают их наиболее эффективными для соблюдения целостности границ открытых территорий.
В настоящее время в основе работы таких систем лежит алгоритм анализа изменения среднего уровня сигнала. Однако в источнике [1] была рассмотрена возможность использования вейвлет-функции Френеля (формула 1) для повышения показателей качества детектирования нарушителя.
 (1)
(1)
Параметры g и с рассчитываются согласно формулам 2 и 3.
 (2)
(2)
где Vn – скорость перемещения нарушителя (м/с); xn – расстояние от нарушителя до центра охраняемой зоны (м); Rm – ширина охраняемой зоны (м).
 (3)
(3)
где N – количество осцилляций, используемых при анализе.
В работе представлен сравнительный анализ показателей надежности двух выше представленных алгоритмов для объектов с низкой скоростью перемещения (не более 3 м/с).
Согласно источнику [1] для обеспечения точности анализа достаточно 5 осцилляций. Для моделирования работы системы необходимо определить ее основные характеристики. Расстояние приемник-передатчик в двупозиционных радиолучевых системах охраны составляет от 100 до 500 метров. Для исследований будет использоваться среднее значение в 300 метров. Длина несущей волны обычно составляет 0,1-0,2 метра. Для исследований будем считать, что длина волны - 0,1 метра. Моделирование будет производиться в критической точке, где ширина главного лепестка функции Френеля минимальна. Этой точкой является максимально близкое расстояние от нарушителя до приемника или передатчика – граница «мертвой зоны» охранной системы. В РЛ ТСО ширина мертвой зоны обычно составляет 0,5 метра.
Подставляя значения в формулы 1, 2 и 3 получаем вейвлет-функцию, представленную на рисунке.
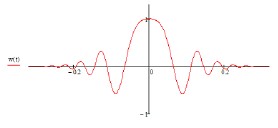
Рис. 1. График вейвлет-функции Френеля
Для моделирования представим информационный сигнал S(t) в виде суммы вейвлет-функции Френеля, характеризующего перемещения нарушителя через охраняемую зону, и "белого шума", моделирующего влияние окружающей среды на информационный сигнал (формула 5).
 (5)
(5)
где w(t) – вейвлет-функция Френеля, Sшум(t) – «белый шум», S – постоянный уровень сигнала.
Для проверки системы на ложные срабатывания сформируем модель сигнала, без воздействия нарушителя, представляющую собой сумму постоянного уровня сигнала и «белого шума» (формула 6).
 (6)
(6)
При анализе на основе среднего уровня среднее значение в идеальном случае равен постоянной составляющей сигнала. Для моделируемой системы примем это значение равное 5.
Для вейвлет-анализа результат преобразования при отсутствие нарушителя должен быть равен квадрату постоянной составляющей сигнала. Для данной модели - 25.
Моделирование производилось в среде программирования QtCreator 3.2.1 на языке С++ с использованием стандартных библиотек.
Результаты моделирования системы представлены в табл. 1 и 2.
Таблица 1
Результаты моделирования системы на основе анализа среднего значения
|
Номер эксперимента |
Эталонное значение |
Значение среднего уровня |
Относительно отклонение, % |
|
При наличии нарушителя |
|||
|
1 |
5 |
6,73 |
34,6 |
|
2 |
6,04 |
20,8 |
|
|
3 |
5,85 |
17 |
|
|
4 |
6,43 |
28,6 |
|
|
5 |
5,83 |
16,6 |
|
|
При отсутствии нарушителя |
|||
|
6 |
5 |
5,14 |
2,8 |
|
7 |
4,82 |
3,6 |
|
|
8 |
4,73 |
5,4 |
|
|
9 |
4,96 |
8 |
|
|
10 |
4,99 |
2 |
|
Таблица 2
Результаты моделирования системы на основе вейвлет-преобразования
|
Номер эксперимента |
Эталонное значение |
Значение вейвлет-преобразования |
Относительное отклонение, % |
|
При наличии нарушителя |
|||
|
1 |
25 |
30,38 |
21,52 |
|
2 |
30,41 |
21,64 |
|
|
3 |
29,87 |
19,48 |
|
|
4 |
30,75 |
23 |
|
|
5 |
29,82 |
19,23 |
|
|
При отсутствии нарушителя |
|||
|
6 |
25 |
23,21 |
7,1 |
|
7 |
24,67 |
1,32 |
|
|
8 |
22,78 |
8,88 |
|
|
9 |
24,22 |
3,12 |
|
|
10 |
26,48 |
5,92 |
|
При отсутствии нарушителя отклонение расчетного значения от эталона не превышает 10% показателя.
При прохождении нарушителя значение на выходе системы имеет более высокое значение, вследствие возникновения интерференционных максимумов у сигнала. Отклонения от эталона составляют от 15 до 30%, что позволяет однозначно детектировать нарушителя с почти 100% вероятностью.
Однако при грубом анализе [3] (отклонение более 50% от эталонного значения) может возникнуть не срабатывание системы. Тогда для повышения вероятности срабатывания системы требуется сузить временной интервал наблюдения.
Таким образом, оба алгоритма обладают достаточно высоким показателями надежности для обработки сигналов двупозиционных РЛ ТСО. Но в то же время алгоритм анализа среднего значения более предпочтителен для решения таких задач, в связи с простотой реализации и меньших временных затрат на выполнение.