

Серийно выпускаемый трубогиб модели ИВ-3430 предназначен для гибки труб в холодном состоянии с оправкой (дорном) и без неё методом наматывания трубы на гибочный ролик. Наибольший наружный диаметр изгибаемой трубы составляет 100 мм.
Недостатками данного метода является:
• Невозможность гибки отводов с малыми (до 1.5D) радиусами;
• Высокие изгибаемые усилия;
• Большая вероятность гофрообразования.
В то же время разработанный в ЮУрГУ метод гибки с раскатыванием позволяет устранить большую часть недостатков [1].
Основные преимущества метода:
• Возможна гибка тонкостенных труб на малые (до 1,5D) радиусы гиба;
• Снижение изгибаемых усилий в 2,5 -3 раза по сравнению с описанным выше методом;
• Возможна гибка труб со стенками средней и особо малой толщины;.
• Снижение энергетических и экономических затрат.
На основании теоретических и практических исследований была произведена модернизация серийного трубогиба ИВ-3430. Трубогиб был снабжен механизмом раскатывания изгибаемой трубы и механизмом создания натяга, выполненном в виде инерционного нагружателя [2].
Кинематическая схема показана на рисунке 1 и состоит из: 1 - электродвигатель А112МА6У1; 2, 4, 18, 20 - шкивы; 3 - ременная передача; 5 - подшипник радиальный; 6 - червячный редуктор РЧУ100–20–51–У2; 7 - муфта; 8 - подшипник радиально-упорный; 9 - червяк; 10/11, 12/13 - зубчатые передачи; 14 - эксцентриковый зажим; 15 - ролик гибочный; 16 - ролик раскатной, 17 - зажимной винт; 19 - инерционный нагружатель; 21 - электродвигатель АИР100Д6У3; 22 - электродвигатель АИР63В4; 23 - насос Х1422М.
Рассмотрим подробно данную кинематическую схему. Труба крепится на борштангу, к концу которой закреплена раскатная головка 16. Конец трубы прижимают к гибочному ролику 15 с помощью эксцентрика 14. В таком состоянии установка готова к началу работы. Двигатель M1 посредством клиноременной передачи 3, червячного редуктора 6, муфты 7 и системы зубчатых передач 10–11, 12–13 передает крутящий момент на гибочный ролик 15. Таким образом осуществляется продольное перемещение трубы. Двигатель М2 приводит во вращение шпиндельный узел, вращающий борштангу и инерционный нагружатель 19. Это обеспечивает вращение раскатной головке 16 и создание натяга. Двигатель М3 запускает насос 23, подающий в область гиба охлаждающую жидкость.
Рассмотрим подробнее механизм создания натяга (рис. 2), основными узлами которого являются: 1 - зажимной винт; 2 - раскатная головка; 3 - борштанга; 4 - шток; 5 - шкив; 6 - шпиндельный узел; 7 - рычаги; 8 - подвижная втулка; 9 - груз.
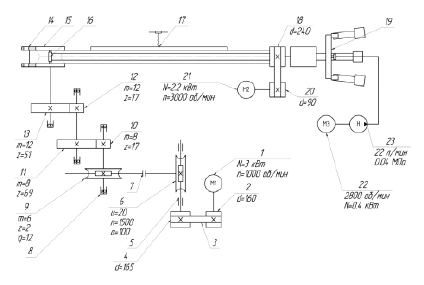
Рис. 1. Кинематическая схема модернизированного ИВ-3430
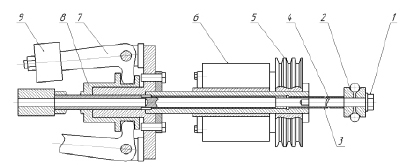
Рис. 2. Инерционный нагружатель
Конструкция инерционного нагружателя состоит из рычагов 7, подвижной втулки 8 и груза 9. Втулка 8 соединена с подвижным штоком 4, который находится внутри борштанги 3. Также на борштанге закреплён шпиндельный узел 6 со шкивом 5. На конце штока закреплена раскатная головка 2 и зажимной винт 1. При вращении борштанги двигателем М2 происходит разведение грузов 9 инерционного нагружателя в стороны. Рычаги 7 под действием сил инерции отводят в сторону втулку 8, которая перемещает в осевом направлении шток 4. При этом винт 1, закрепленный на конце штока, упирается в раскатную головку 2, создавая таким образом натяг.
На рис. 3 представлена электрическая схема данного трубогиба: М1, М2 - двигатели асинхронные; М3 - электронасос; КК1...КК3 - реле электротепловое; КМ1...КМ4 - магнитные пускатели; Q1 - выключатель автоматический; SB1...SB8 - кнопки пуска/останова.
Запуск системы происходит замыканием QF1. Прямой и обратный ход трубы осуществляется двигателем М1 и кнопками SB1 и SB2 соответственно. Включение двигателя раскатки М2 происходит кнопкой SB5. Кнопка SB7 запускает двигатель М3, запускающий подачу жидкости в область гиба. При необходимости остановки всех двигателей используется кнопка SB8. Защиту от перепадов напряжения, высоких токов нагрузки и т.п. осуществляют электротепловые реле и автоматический выключатель.
Многолетние испытания гибки труб методом раскатывания выявили ряд недостатков в приведенной системе управления [3]. Как видно из электрической схемы (рис. 3), двигатели М1 и М2 работают не согласованно. Отсутствие регулировки времени выхода двигателей на максимальные обороты приводит к образованию на внутренней части трубы нежелательных уступов в начальный и конечный моменты времени гиба (рис. 4, 5). Данный дефект может негативно сказаться на эксплуатационных свойствах трубы, а также стать причиной её разрушения в данных сечениях.
Также невозможность плавного пуска двигателей приводит к сокращению их срока службы. Ввиду отсутствия регулировки частоты вращения двигателей, гибка различных по толщине и диаметру труб осуществляется при одинаковых режимах работы.
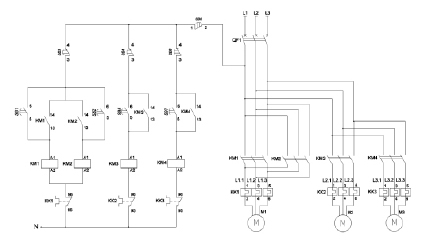
Рис. 3. Электрическая схема трубогиба ИВ-3430
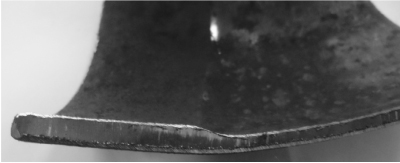
Рис. 4. Дефект внутренней стороны трубы в начале гиба
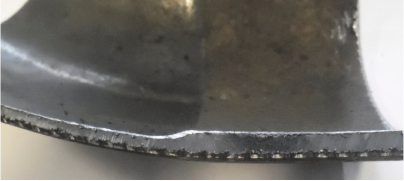
Рис. 5. Дефект внутренней стороны трубы в конце гиба
Ряд перечисленных проблем можно решить путем совершенствования системы управления станка, что позволит упростить работу оператора, а также повысит точность и производительность гибки труб методом раскатывания. Для этого была разработана функциональная схема управления трубогибом, показанная на рис. 6. Выделим главные функции системы управления:
• Управление инерционным нагружателем;
• Прямой/обратный ход гибочного ролика;
• Отображение и редактирование параметров гиба;
• Контроль угла гиба.
Преобразователи частоты устраняют выделенные проблемы, связанные с работой и регулировкой частоты вращения двигателей. Датчик угловых перемещений является высокоточным устройством, который работает напрямую с промышленным контроллером. Все измененяемые параметры отображаются на панели оператора.
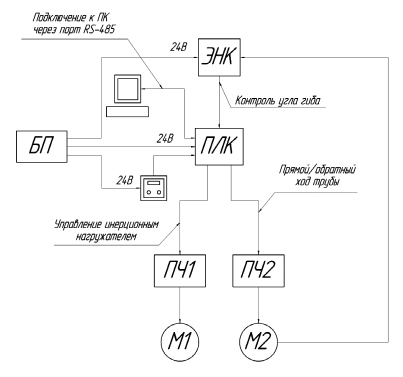
Рис. 6. Функциональная схема системы управления трубогибом Обозначения на схеме:  – приборная панель оператора;
– приборная панель оператора;  – персональный компьютер; ЭНК – датчик угловых перемещений (энкодер); БП – блок питания; ПЛК – программируемый логический контроллер; М1 – привод механизма раскатки; М2 – привод механизма продольного перемещения трубы; ПЧ1/ПЧ2 – преобразователи частоты
– персональный компьютер; ЭНК – датчик угловых перемещений (энкодер); БП – блок питания; ПЛК – программируемый логический контроллер; М1 – привод механизма раскатки; М2 – привод механизма продольного перемещения трубы; ПЧ1/ПЧ2 – преобразователи частоты
Двигатели для плавного пуска, останова и регулирования частоты вращения подключены к преобразователям частоты. Ввод технических данных для гибки производится как с контроллера, так и с приборной панели оператора, подключенной к ПЛК.
Гибка начинается по нажатию кнопки «пуск» с панели оператора. Энкодер отправляет сигнал на ПЛК о начальном (нулевом) положении гибочного ролика. ПЛК отправляет сигнал на включение двигателей. В этот момент происходит гиб трубы. Данные об изменении положения гибочного ролика отправляется для сравнения с требуемым на ПЛК посредством обратной связи. При достижении требуемого угла гиба, контроллер останавливает двигатели.
По нажатию кнопки «реверс» с панели оператора происходит отжим трубы двигателем М2 от гибочного ролика. Угол отжима является задаваемым параметром. При достижении этого угла происходит останов двигателя М2.
Внедрение новых устройств в текущую систему управления приводит к изменению электрической схемы трубогиба. На основании функциональной схемы управления (рис. 6), была разработана принципиальная электрическая схема (рис. 7). Установленные ПЧ1 и ПЧ2 заменяют собой магнитные пускатели КМ1–КМ4, защитные теплореле КК1–КК3 для двигателей, что повышает надежность системы в целом.
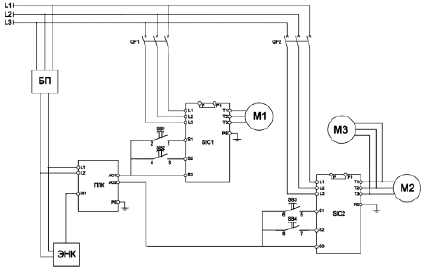
Рис. 7. Схема электрическая принципиальная
На данной схеме приведены следующие условные обозначения:
М1 - двигатель гибочного ролика; М2 - двигатель раскатной головки; М3 - двигатель подачи охлаждающей жидкости; QF1/QF2 - автоматические выключатели; SB1/SB3 - кнопки пуска и останова; SB2/SB4 - кнопки реверса и останова; SIC1/SIC2 - преобразователи частоты; ПЛК - программируемый логический контроллер; ЭНК - датчик угла поворота; БП - блок питания.
Разработана циклограмма работы трубогиба, представленная на рисунке 8. Цикл гибки трубы можно условно разделить на три временные группы: 1 - закрепление трубы; 2 - гибка трубы; 3 - снятие трубы. На участке 1 происходит загрузка трубы. В этот момент подается питание и включается ПЛК. На участке 2–3 происходит закрепление трубы с помощью зажимного механизма. Этот процесс занимает длительное время, т.к. возникает необходимость в точном позиционировании трубы на раскатной головке. На участке 4 происходит плавный пуск двигателей раскатной головки и гибочного вала от ПЧ. Также включается датчик угла поворота, который передает информацию о положении гибочного вала на ПЛК. Участок 5–6 представляет собой прямой рабочий ход. На этом этапе происходит гибка трубы гибочным роликом. На участке 7 показан плавный останов рабочего хода. Трубу на участке 8 перед обратным ходом необходимо немного отжать. В противном случае снять трубу будет проблематично ввиду сил, которые труба оказывает на механизм зажима. На участках 9–11 показан обратный ход и плавный останов двигателя гибочного ролика. Данный процесс занимает продолжительное время ввиду невысоких оборотов гибочного вала. После полной остановки происходит окончательный отжим трубы (участок 12). На участке 13 происходит снятие готовой трубы и трубогиб переходит в режим ожидания, который показан на участке 14.
Общее время работы составляет 8.5 минут и может варьироваться в зависимости от параметров трубы, технических требований, а также профессиональных навыков и опыта оператора.
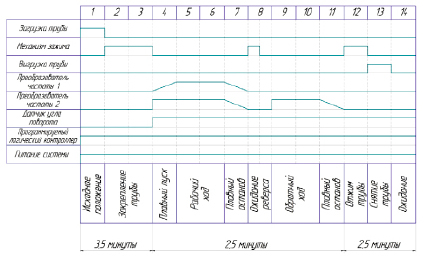
Рис. 8. Циклограмма работы трубогиба ИВ-3430
Заключение
В настоящее время реализовано векторное частотное управление асинхронными двигателями (рис. 9). Модернизированный трубогиб внедрён в производство. Была произведена гибка опытной партии труб ∅52×5 мм из стали марки 12Х18Н10Т (рис. 10) и ∅108×5 мм из ст20. Как видно из рис. 10, удалось добиться плавного перехода на внутренней стороне трубы [4].

Рис. 9. Установленные преобразователи частоты
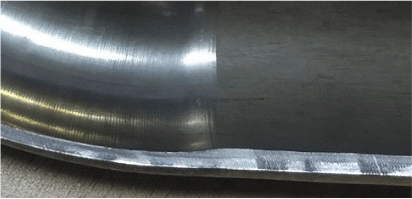
Рис. 10. Фото продольного сечения изогнутой трубы из стали марки 12Х18Н10Т
Библиографическая ссылка
Козлов А.В., Верещагин А.С. СОВЕРШЕНСТВОВАНИЕ СИСТЕМЫ УПРАВЛЕНИЯ МОДЕРНИЗИРОВАННОГО ТРУБОГИБА МОДЕЛИ ИВ-3430 // Международный студенческий научный вестник. – 2018. – № 3-2. ;URL: https://eduherald.ru/ru/article/view?id=18234 (дата обращения: 17.08.2024).