

Современные лаборатории нуждаются в полной приспособленности оборудования к различному спектру задач. В данной статье мы рассмотрим методы обеспечения медленного вращения в лабораторных установках. Это требуется для сокращения средств, затрачиваемых на узкоспециализированное оборудование, включающее в себя излишние запасы по мощности или имеющие недостаточную износоустойчивость. Все это требует тщательного анализа возможных видов данного оборудования.
Рассматривая возможные варианты реализации процесса медленного вращения, выявились следующие факторы отбора двигателя: возможность регулировки как скорости, так и направления вращения, поддержание широкого диапазона регулирования скорости и возможность осуществления вращения на низких оборотах (иногда ниже 0,5 оборотов в сутки), отсутствие завышенных требований по моменту вращения (обычно не более 1 Нм) и тормозящему моменту (в среднем 1200 г·см), возможность точного позиционирования якоря и при этом отсутствие жестких требований по точности поддержания заданной скорости (низкая-средняя точность). Также не менее важны сравнительно малые габариты оборудования и по возможности отсутствие (громоздкого) вспомогательного оборудования [4].
1. Виды приводов, используемые для обеспечения вращательного движения
Рассмотрим классификацию приводов, которые могут обеспечивать низкоскоростное вращательное движение.
Сравнительные характеристики приводов вращения
|
Приводы вращения |
Точность поддержания скорости |
Надежность |
Диапазон регулирования /угол поворота |
Стоимость |
|
|
1. |
Механический |
||||
|
на основе пружинного часового механизма |
средняя |
средняя |
1:1 |
низкая |
|
|
2. |
Электромеханический |
||||
|
на основе часового механизма с электрическим тактированием |
высокая |
средняя |
1:1 |
низкая |
|
|
3. |
Электрический |
||||
|
на основе синхронного двигателя, с питанием током постоянной частоты |
средняя |
высокая |
1:1 |
низкая |
|
|
на основе синхронного двигателя, с частотным управлением |
высокая |
высокая |
1:100 |
высокая |
|
|
на основе асинхронного двигателя, с частотным скалярным управлением |
средняя |
высокая |
1:100 |
средняя |
|
|
на основе асинхронного двигателя, с частотным векторным управлением |
высокая |
высокая |
1:1000 |
высокая |
|
|
на основе вентильного двигателя, с частотным управлением |
Очень высокая |
высокая |
1:1000 |
высокая |
|
|
на основе двигателя постоянного тока с шим-управлением |
средняя |
высокая |
1:100 |
средняя |
|
|
на основе шагового двигателя с полношаговым управлением |
высокая |
высокая |
1.8 ° |
низкая |
|
|
на основе шагового двигателя с дробно-шаговым управлением |
Очень высокая |
высокая |
0.2” |
средняя |
2. Возможные варианты кинематики привода вращения
Приводы прямого действия. Данный тип приводов имеет наиболее высокий КПД в рабочем диапазоне скоростей вращения и мощностей (моментов). Для данного типа характерно применение электрических приводов, которые могут обойтись без дополнительного оборудования, такого как: передаточный механизм; регулятор или колебательная система в часовом механизме; градусника, который предназначен для регулировки периода колебаний, а также самого механизма заводки пружины. Прямой привод упрощает конструкцию средств автоматизации.
Приводы ременной передачи. Данные приводы часто используются с двигателями среднего-высокого крутящего момента и мощности, к которым можно отнести асинхронные и синхронные двигатели. Этот вид передачи реализуется за счет сил трения или сил зацепления, включает в себя гибкий элемент. Это позволяет скомпенсировать перегрузки (за счет проскальзывания) и сгладить пульсации, возникающие в процессе работы двигателя. Привод ременной передачи самый экономичный, то есть не требует больших затрат на замену ремней, что нельзя сказать о редукторах. Если сравнивать с зубчатой передачей, то ременная дает возможность передачи движения между валами, находящимися на значительном расстоянии друг от друга. Недостатками является малый срок службы и малая несущая способность, которая возникает из-за эффекта скольжения. Почти всех этих недостатков лишена цепная передача, за исключением эффекта растяжения во время работы.
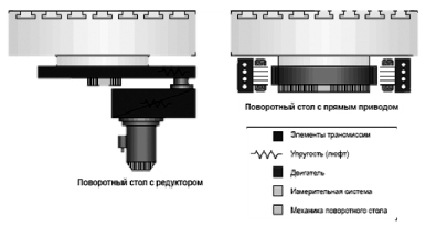
Рис. 1. Сравнение редукторной передачи с прямым приводом
Приводы редукторной (зубчатой) передачи или их разновидность приводы с ведущим роликом. Этот тип популярен как для механических и электромеханических приводов, так и для электрических. Редукторная передача зачастую используется с двигателями высоких мощностей из-за своей прочности и износоустойчивости. Его применение позволяет регулировать угол поворота якоря шагового двигателя за один поданный на него импульс (это достигается подбором передаточного числа), что принципиально важно в установках медленного вращения. [2] В приводах с ведущим роликом используется тот же принцип передаточного числа, но вместо шестерни используется валик, т.е. передача вращательного движения происходит за счет трения валиков. Данный тип передачи менее дорогостоящий и используется в маломощных установках, где не требуется высокий момент.

Рис. 2. Структурная схема привода с шаговым двигателем для медленного вращения круглой платформы (диска)
Приводы ременной передачи. Данные приводы часто используются с двигателями среднего-высокого крутящего момента и мощности, к которым можно отнести асинхронные и синхронные двигатели. Этот вид передачи реализуется за счет сил трения или сил зацепления, включает в себя гибкий элемент. Это позволяет скомпенсировать перегрузки (за счет проскальзывания) и сгладить пульсации, возникающие в процессе работы двигателя. Привод ременной передачи самый экономичный, то есть не требует больших затрат на замену ремней, что нельзя сказать о редукторах. Если сравнивать с зубчатой передачей, то ременная дает возможность передачи движения между валами, находящимися на значительном расстоянии друг от друга. Недостатками является малый срок службы и малая несущая способность, которая возникает из-за эффекта скольжения. Почти всех этих недостатков лишена цепная передача, за исключением эффекта растяжения во время работы.
Таким образом, мы рассмотрели возможные варианты реализации медленного вращения в лабораторных установках. Исходя из факторов подбора нужного привода, которые мы определили во введении, следует следующее заключение. Привод должен быть с ведущим роликом или иметь редукторную (зубчатую) передачу (нам не требуется использовать двигатели высокой мощности, которые создают излишние вибрации или высокий крутящий момент). Также привод должен основываться на следующих типах двигателей: двигатель постоянного тока с ШИМ-управлением, двигатель с полношаговым управлением, шаговый двигатель с дробно-шаговым управлением.
Библиографическая ссылка
Донской Д.Ю. АНАЛИЗ МЕТОДОВ ОБЕСПЕЧЕНИЯ МЕДЛЕННОГО ВРАЩЕНИЯ В ЛАБОРАТОРНЫХ УСТАНОВКАХ // Международный студенческий научный вестник. – 2018. – № 3-2. ;URL: https://eduherald.ru/ru/article/view?id=18232 (дата обращения: 27.12.2024).