

Введение
Большинство систем для поиска и идентификации объектов на изображении требуют огромных вычислительных мощностей, а в случае мобильных устройств постоянная работа камеры и высокая нагрузка на процессор создает проблему больших затрат энергии. Потребление больших вычислительных мощностей обусловлено необходимостью предварительной обработки получаемых на вход изображений. Для решения проблемы обнаружения и идентификации объектов создано множество алгоритмов, позволяющих проектировать более производительное программное обеспечение[3].
Исходя из описанного выше можно в общем виде построить алгоритм для обнаружения и идентификации объектов:
1. Предварительная обработка изображения;
2. Поиск объекта (для нашей задачи это будет окружность, прямоугольник или треугольник);
3. Распознавание объекта.
Предварительная обработка изображения. Одним из главных препятствий в решении задачи распознавания является качество снимков, отсюда возникает необходимость предварительной обработки изображений[2,5]. Так как для дорожных знаков при изготовлении используется строго определенный набор цветов, для предварительной обработки изображений можно использовать выделение цветов геометрических примитивов [1].
Для задачи поиска цвета наиболее удобным решением является перевод изображения в цветовую модель HSV, которая предполагает более четкое разграничение цветов. Для перевода к данной цветовой модели из цветового пространства RGB необходимо воспользоваться (1):

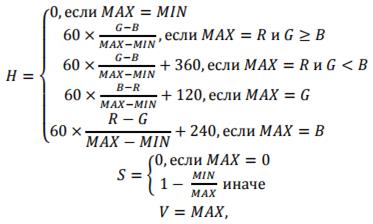
где H [0,360]; S,V,R,G,B[0,1], а МАХ – максимальное из значений R,G,B, MIN – минимальное.
[0,360]; S,V,R,G,B[0,1], а МАХ – максимальное из значений R,G,B, MIN – минимальное.
Для данной цветовой модели важной компонентой в рамках поставленной задачи будет цветовой тон Н, остальные компоненты следует выбирать максимальными так как они зависят от окружения [7].
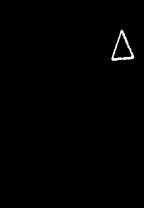
После определения границ цвета требуется анализировать изображение попиксельно, а затем проводить бинаризацию. Под бинаризацией подразумевается, что цвет каждого пикселя имеющего значение цветового тона в пределах искомого цвета делаем белым, остальные пиксели делаем черными (Рис.1).

а) б)
Рис.1 Этапы предварительной обработки изображения:
а) Изображение полученное с видеорегистратора
б) Выделение красного цвета и бинаризация
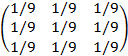
Следующим этапом в предварительной обработке является сглаживание. В качестве фильтра выбран матричный фильтр размерности 3х3 (2):
 (2)
(2)
В процессе применения фильтра компоненты изображения перемножаются на коэффициенты матрицы, а затем складываются. Затем полученные компоненты делятся на размерность матрицы фильтра, после чего получаем компоненты RGB, которые присваиваются пикселям после применения к ним матричного фильтра.
Результат применения фильтра (2) к рис. 1 можно увидеть на рис. 2.

Рис.2 Применение фильтра сглаживания.
Поиск объекта
Для поиска объекта требуется выделить границы искомого объекта. Для этой цели хорошо подходит детектор Кенни [4]. Реализация данного детектора присутствует в библиотеке OpenCV. В основе его работы лежит градиентный оператор Собеля. Различные программные реализации позволяют указать пороги минимума, максимума и размерность оператора Соболя при вызове метода. Маски, используемые оператором Собеля [8], представлены на рис.3.
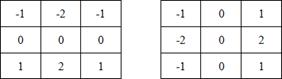
Рис.3 Маски оператора Собеля
Эффект применения оператора Собеля к рис. 2 можно увидеть на рис. 4.
Рис.4 Выделение границ с помощью оператора Собеля
Распознавание объекта. Далее требуется распознать полученный контур. Для этого можно использовать сравнение моментов. Чтобы использовать данный подход необходимо иметь образец фигуры, в результате обработки которой будет найден нужный контур. Сравнение моментов контуров реализуется с помощью составления карты контуров и последующего сопоставления знака с помощью преобразования Фурье. Для данного метода возможно три варианта сравнения, использующие инвариантные моменты, являющиеся линейной комбинацией нормализованных центральных моментов[9]. Выражение вида (3) является двумерным моментом порядка (p+q) [6].
 (3)
(3)
где D-область изображения, для которой вычисляются моменты. Для описания изображения совместная вероятность p(x, y) заменяется на функцию яркости изображения f(x,y). Переход к центральным моментам обеспечивает инвариантность двумерных моментов к сдвигу [6]. После преобразований получим выражение (4)
 (4)
(4)
где  – координаты центра области D.
– координаты центра области D.
Переход к нормализованным центральным моментам обеспечивает инвариантность относительно масштабирования.
В качестве меры сходства изображений возможен выбор между тремя функциями (5)
 ,
,  ,
,  , (5)
, (5)
где  ,
,  , а
, а  - моменты Hu изображений A и B соответственно.
- моменты Hu изображений A и B соответственно.
Выводы. В данной статье была рассмотрена многоэтапная модель распознавания объектов, в основе которой метод сравнения моментов. Данная модель обеспечивает хорошую производительность для задачи нахождения однотипных объектов. В случае, если изображение подается затемненным или с бликами, тогда требуется его дальнейшее улучшение [9]. Так же для более гибкого распознавания можно использовать методы машинного обучения. Одним из таких методов является каскадный классификатор на основе признаков Хаара, который в свою очередь использует метод Виолы-Джонса [10].
Библиографическая ссылка
Аккуратов В.В., Пчелинцева Н.И., Черепков Е.А. ИСCЛЕДОВАНИЕ АЛГОРИТМОВ ОБНАРУЖЕНИЯ И РАСПОЗНАВАНИЯ ДОРОЖНЫХ ЗНАКОВ // Международный студенческий научный вестник. – 2018. – № 1. ;URL: https://eduherald.ru/ru/article/view?id=18031 (дата обращения: 20.04.2024).