

Математика всегда была основой точного естествознания, а вместе с механикой является фундаментом всех технических наук, основным инструментом в познании общих закономерностей мироздания.
Теоретическая механика рассматривается с разных точек зрения. С одной стороны – это часть теоретической физики, изучающая математические методы классической механики, альтернативные прямому применению законов Ньютона (так называемая аналитическая механика). С другой стороны – это набор физико-математических методов, облегчающих расчёты механизмов, сооружений и различных конструкций. Её также можно рассматривать как часть естествознания, использующую математические методы, имеющую дело не с самими реальными материальными объектами, а с их моделями.
Моделями теоретической механики являются материальные точки и их системы, абсолютно твёрдые тела и их системы, деформируемые сплошные среды. Эти модели исследуются в таких разделах теоретической механики, как кинематика, статика, динамика. Исследования моделей производятся с помощью таких разделов математики, как векторное исчисление, дифференциальная геометрия, математический анализ, особенно дифференциальные уравнения, вариационное исчисление.
Для описания положения и движения материальных объектов в механической системе используется векторная алгебра: каждый объект задаётся радиус-вектором, а вся механическая система – совокупностью векторов. В дальнейшем положение тела относительно начала отсчета определяется по положению какой-либо его точки, фиксированной в теле, по положениям остальных точек тела относительно этой фиксированной точки и по угловым параметрам ориентации или по матрице ориентации тела относительно абсолютного пространства. Использование матриц приводит к применению законов линейной алгебры. Движение материальной точки наиболее удобно описывать такими вектор-функциями  (законами), которые имеют непрерывные вторые производные по времени, что заставляет применять такой раздел математики, как дифференциальная геометрия, который подразумевает хорошее знание, как геометрии, так и математического анализа.
(законами), которые имеют непрерывные вторые производные по времени, что заставляет применять такой раздел математики, как дифференциальная геометрия, который подразумевает хорошее знание, как геометрии, так и математического анализа.
Рассматривая кинетическую энергию механической системы, необходимо владеть навыками вычисления частных производных функций нескольких переменных, составлять из них матрицы, выделять в записи формул кинетической энергии линейные и квадратичные формы.
В процессе нахождения работы системы сил при действительных линейных перемещениях механической системы задействуется интегральное исчисление (чаще всего вычисляется криволинейный интеграл).
Все выше названные разделы математики в основном задействованы для теоретического описания процессов, на практике чаще используются уже выведенные формулы, как, например, в классической задаче теоретической механики.
Пусть механическая система, изображённая на рисунке, состоит из катков (или катка и подвижного блока) 1 и 2, ступенчатого шкива 3 с радиусами ступеней  м,
м,  м и радиусом инерции относительно оси вращения
м и радиусом инерции относительно оси вращения , блока 4 радиуса
, блока 4 радиуса  м и грузов 5 и 6. Тела 1 и 2 считать сплошными однородными цилиндрами, а массу блока 4 - равномерно распределенной по ободу. Коэффициент трения грузов о плоскость
м и грузов 5 и 6. Тела 1 и 2 считать сплошными однородными цилиндрами, а массу блока 4 - равномерно распределенной по ободу. Коэффициент трения грузов о плоскость . Тела системы соединены друг с другом нитями, перекинутыми через блоки и намотанными на шкив 3 (или на шкив и один из катков); участки нитей параллельны соответствующим плоскостям. К одному из тел прикреплена пружина с коэффициентом жесткости С = 200Н/м.
. Тела системы соединены друг с другом нитями, перекинутыми через блоки и намотанными на шкив 3 (или на шкив и один из катков); участки нитей параллельны соответствующим плоскостям. К одному из тел прикреплена пружина с коэффициентом жесткости С = 200Н/м.
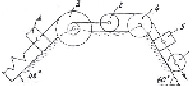
Под действием силы  Н, зависящей от перемещения
Н, зависящей от перемещения  точки её приложения, система приходит в движение из состояния покоя; деформация пружины в момент начала движения равна нулю. При движении на шкив 3 действует постоянный момент М = 1,2 Н∙м сил сопротивления (от трения в подшипниках). Необходимо определить значение линейной скорости
точки её приложения, система приходит в движение из состояния покоя; деформация пружины в момент начала движения равна нулю. При движении на шкив 3 действует постоянный момент М = 1,2 Н∙м сил сопротивления (от трения в подшипниках). Необходимо определить значение линейной скорости  в тот момент времени, когда перемещение
в тот момент времени, когда перемещение  станет равным
станет равным  м. Все катки, включая и катки, обмотанные нитями, катятся по плоскостям без скольжения.
м. Все катки, включая и катки, обмотанные нитями, катятся по плоскостям без скольжения.
По условию
 .
.
Искомую скорость  катка 1 находим с помощью теоремы о Сумме кинетической энергии системы
катка 1 находим с помощью теоремы о Сумме кинетической энергии системы  . Так как движения происходят из состояния покоя, то кинетическая энергия в системе в начале движения
. Так как движения происходят из состояния покоя, то кинетическая энергия в системе в начале движения  . Кинетическая энергия системы будет равна сумме кинетических энергий всех тел, входящих в систему в момент, когда система пройдет заданные расстояния.
. Кинетическая энергия системы будет равна сумме кинетических энергий всех тел, входящих в систему в момент, когда система пройдет заданные расстояния.
Кинетическая энергия груза 5 ,движущегося поступательно со скоростью  равна
равна
 .
.
Кинетическая энергия катка 2, участвующего в плоском движении составит:
 ,
,
где  – угловая скорость катка в этом
– угловая скорость катка в этом
движении, показывающая связь криволинейных величин с линейными величинами (выводится с помощью дифференциальной геометрии).
Скорость катка 2 определяется по формуле:
 .
.
Величина  – момент инерции катка 2.
– момент инерции катка 2.
Следовательно, кинетическую энергию катка 2 можно определить следующим образом:
 .
.
Кинетическая энергия ступенчатого блока, вращающегося с угловой скоростью
 ,
,
можно установить с помощью формулы:  ,
,
где  – момент инерции ступенчатого шкива 3.
– момент инерции ступенчатого шкива 3.
Следовательно,
 .
.
Кинетическая энергия составит
 .
.
Находим работу внешних сил, приложенных к системе, при которой груз 5 сместится на расстояние  .
.
Работа силы  на этом перемещении определяется с помощью интеграла:
на этом перемещении определяется с помощью интеграла:
 .
.
Работа силы тяжести груза 5 определим с помощью соотношений в прямоугольном треугольнике с использованием тригонометрических функций углов:
 .
.
Аналогично определяется работа силы трения груза 5 на наклонную плоскость:
 .
.
Работы сил  равны нулю, так как они перпендикулярны перемещению.
равны нулю, так как они перпендикулярны перемещению.
Работы сил  равны нулю, так как они приложены к неподвижной точке.
равны нулю, так как они приложены к неподвижной точке.
Работа момента М сил сопротивления, приложенного к ступенчатому блоку, составит: ,
,
где  раз, тогда А(М) = – 1,2 Дж.
раз, тогда А(М) = – 1,2 Дж.
Работа сил упругости пружин  , где
, где
 Ом, тогда
Ом, тогда  Дж.
Дж.
Отсюда
 35,4 Дж.
35,4 Дж.
Получим  35,4 Дж, и окончательно
35,4 Дж, и окончательно
 = 2,39 м/с.
= 2,39 м/с.
Окончательно, линейная скорость катка 1будет равна:  = 2,39 м/с.
= 2,39 м/с.
Решение задачи можно выполнять по определённой схеме, используя соответствующие формулы теоретической механики. Но для более глубокого понимания исследуемого движения механической системы нужно не только знать эти формулы, но и представлять, как они получены, что приводит к необходимости привлечения серьёзного математического аппарата, умению пользоваться им, применять в непривычных сочетаниях.
Библиографическая ссылка
Журавлёв И.В., Рыбалкин Н.А., Попова С.В. ПРИМЕНЕНИЕ СРЕДСТВ МАТЕМАТИКИ ДЛЯ ОПРЕДЕЛЕНИЯ СКОРОСТИ КАТКА СТУПЕНЧАТОГО БЛОКА // Международный студенческий научный вестник. – 2015. – № 3-4. ;URL: https://eduherald.ru/ru/article/view?id=14125 (дата обращения: 21.11.2024).