

Ученые Томского Государственного университета и Университета Ньюкасла (Великобритания) в 2020 году займутся изучением углеродного цикла Васюганских болот, что бы понять причины глобальных изменений окружающей среды, которые сейчас происходят на планете. В рамках данного исследования, для анализа лигнина, специалистам необходимо будет взять пробы торфа на территории заповедника Васюганский. Для передвижения мобильной научной лаборатории по территории с уникальной флорой и фауной, мы предлагаем использовать вездеход с разработанной нами независимой подвеской.
При работе над моделью такого вездехода встает крайне важный вопрос об управлении независимой подвеской. Необходимо найти самый удобный и доступный способ для построения «мозга» машины.
Подвеска была спроектирована под небольшие двигатели модели ТТ, которые располагаются независимо друг от друга и подключаются через драйверы для двух двигателей в плату Arduino.
На рисунке 1 представлена 3D модель независимой подвески вездехода с двигателями ТТ типа [1].
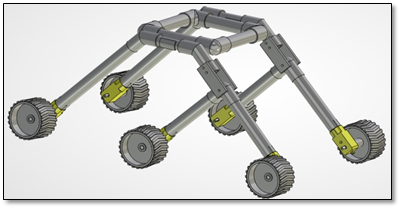
Рисунок 1. 3D модель конструкции независимой подвески с двигателями ТТ типа.
Для подключения двигателей были использованы следующие составляющие:
· Плата Arduino UNO (1 шт.)
· Драйвер L298N (3 шт.)
· Соединительные провода, резисторы, транзисторы.
· Двигатели ТТ (6 шт.)
· Макетная плата (1 шт.)
· Батарейки.
Подключение будет происходить с помощью присоединения модулей L298N к плате Arduino. Так как независимых моторов 6,то драйверов L298N будет три.
На рисунке 2 показано подключение 2-х двигателей к драйверу, а через него к плате.
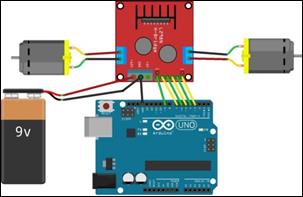
Рисунок 2. Подключение двигателей ТТ типа к Arduino.
Питание будет осуществляться от блока батарей напряжением в 9В. Сам блок будет подключён к плате Arduino [2].
Стоит сказать и о выборе Arduino. Данная система позволяет удобно подключать к себе различные элементы без использования пайки. Это значительно уменьшает время сбора схем и конструкций. Особенно Arduino помогает в макетировании, где нужно подключать детали небольших размеров.
Подключение элементов схем является важной задачей в проектировании модели. Чтобы добиться работоспособности устройства, нужно правильно составить схему и тщательно проверить элементы на качество.
Библиографическая ссылка
Стасевский В.И., Мотовилов М.А. МОДЕЛЬ НЕЗАВИСИМОЙ ПОДВЕСКИ // Международный студенческий научный вестник. – 2020. – № 2. ;URL: https://eduherald.ru/ru/article/view?id=20050 (дата обращения: 19.04.2024).