

Введение
Модель любой целесообразной деятельности можно представить как систему, состоящую из объекта (познания, управления, трансформации и т.п.) и некоторой воздействующей на него системы - системы управления (СУ). Система управления может быть полностью автоматической (т.е. взаимодействовать с объектом без участия человека; например, банкомат), неавтоматизированной (т.е. не имеющей в составе компьютер; например, бригада рабочих, роющих траншею), автоматизированной (т.е. содержащей как людей, так и компьютеры; например, автоматизированная система налогообложения).
АСУТП - это система, которая на базе высокоэффективной вычислительной и управляющей техники обеспечивает автоматизированное (автоматическое) управление технологическим комплексом с использованием централизованно обработанной информации по заданным технологическим и технико-экономическим критериям, определяющим качественные и количественные результаты выработки продукта, и подготавливает информацию для решения организационно-экономических задач.
Централизованные АСУ ТП
Централизованная структура осуществляет реализацию всех процессов управления объектами в едином органе управления, который осуществляет сбор и обработку информации об управляемых объектах и на основе их анализа в соответствии с критериями системы вырабатывает управляющие сигналы. Появление этого класса структур связано с увеличением числа контролируемых, регулируемых и управляемых параметров и, как правило, с территориальной рассредоточенностью объекта управления.
Достоинствами централизованной структуры являются достаточно простая реализация процессов информационного взаимодействия; принципиальная возможность оптимального управления системой в целом; достаточно легкая коррекция оперативно изменяемых входных параметров; возможность достижения максимальной эксплуатационной эффективности при минимальной избыточности технических средств управления. [3]
Недостатки централизованной структуры следующие: необходимость высокой надежности и производительности технических средств управления для достижения приемлемого качества управления; высокая суммарная протяженность каналов связи при наличии территориальной рассредоточенности объектов управления. [3]
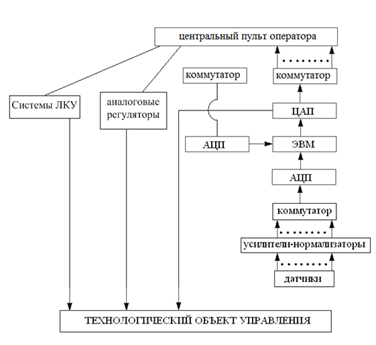
Рисунок 1 - Структура централизованной АСУ ТП
Информация об объекте управления поступает в виде сигналов с многочисленных датчиков. Это датчики температуры, уровня, перемещения, давления и других физических величин. Поскольку сигналы с датчиков имеют низкий уровень, эти сигналы усиливаются и приводятся к одному диапазону. Эту задачу выполняют усилители-нормализаторы.
Поскольку датчиков много, необходимо их опросить последовательно, один за другим. Для этого нужно кратковременно подключить каждый датчик и измерить соответствующий параметр. Эту задачу выполняет коммутатор. Коммутатор в каждый отдельный момент времени подключает каждый датчик к аналого – цифровому преобразователю (АЦП). [1]
В течение работы системы происходит многократный опрос датчиков системы, т.е. информация постоянно обновляется. Преобразованные в цифровой код значения параметров поступают в ЭВМ и запоминаются в памяти.
В ЭВМ осуществляется обработка данных и вычисление сигналов для исполнительных механизмов.
Для устройств, работающих в режиме логико-командного управления (ЛКУ), вычисляются значения логических функций, определяющих значение выходного сигнала для исполнительного устройства (вкл/выкл).
Для устройств системы аналогового регулирования вычисляется сигнал, пропорциональный режиму работы данного устройства (например частота вращения двигателя). Эти сигналы преобразуются в электрический вид с помощью цифро-аналогового преобразователя (ЦАП). Обычно такой преобразователь многоканальный.
Сигналы с ЦАП поступают на исполнительные механизмы. Такой порядок работы АСУ ТП характерен и для современных систем.
Для централизованных АСУ ТП характерно наличие центрального пульта оператора. На него выводились сигналы с датчиков, которые отображались различными ламповыми и стрелочными индикаторами. Для управления процессом на пульте имелись многочисленные выключатели и регуляторы. Обмен информацией между ЭВМ и центральным пультом оператора (выдача сигналов индикации о состоянии объекта и прием команд оператора) осуществлялся с помощью коммутаторов, АЦП и ЦАП. [9]
В современных системах вместо центрального пульта используется монитор ЭВМ.
Особенно ответственные участки технологического объекта управлялись, минуя центральную ЭВМ, с помощью локальных устройств логикокомандного управления и аналогового регулирования – ЛКУ и аналоговых регуляторов. Это могли быть, например, сигналы аварийного отключения. [2]
Основным недостатком централизованной структуры была низкая надежность. Любой сбой или отказ в ЭВМ приводил к неработоспособности всего технологического объекта.
SCADA-система TRACE MODE
TRACE MODE 5.04 – это российский SCADA-продукт, разработанный фирмой AdAstra Ltd. С его помощью можно не только разрабатывать распределенные АРМ операторов технологического процесса, но и запрограммировать контроллеры, а также связать АСУТП с корпоративной информационной системой предприятия и глобальной сетью Internet.
TRACE MODE основана на DCOM – базовой 32-разрядной технологии корпорации Microsoft, положенной в основу всех ее современных продуктов, начиная от Windows NT и заканчивая Office2000.
Система разработки TRACE MODE содержит ряд новых технологий проектирования АСУТП, отличающих ее от других SCADA-систем. Среди них следующие:
- Обеспечение единых инструментальных средств (единой линии программирования) как для разработки операторских станций, так и для программирования контроллеров;
- Разработка распределенной АСУТП как единого проекта;
- Технология авто построения проекта.
Традиционно SCADA-системы понимались как инструмент разработки программного обеспечения для рабочих мест диспетчеров, т.е. для верхнего уровня АСУТП.
Программирование промышленных контроллеров или интеллектуальных датчиков производилось иными программными средствами или специальными программаторами, поставляемыми с оборудованием. После появления и массового распространения IBM PC-совместимых контроллеров появилась возможность унифицировать программное обеспечение для операторских станций и промышленных контроллеров.
В распределенных SCADA-системах разработка проекта привязана к одной операторской станции. Поэтому при разработке сетевых комплексов сначала создаются базы данных реального времени для отдельных ПК, и лишь потом они объединяются в сеть.
Однако современные промышленные АСУ «живут» и развиваются десятки лет, имеют тенденцию к интеграции как между собой, так и с АСУ финансово-хозяйственных служб. За это время меняется технология, добавляются и заменяются датчики, АРМ, модифицируется программное обеспечение АСУ. Поддерживать и развивать системы, состоящие их многих обособленных ПК и контроллеров, каждый из которых ничего не «знает» о других, и трудно, и дорого. Чтобы этого избежать, можно использовать архитектуру клиент-сервер, но сосредоточение базы данных реального времени на сервере снижает надежность системы.
В TRACE MODE 5 распределенная АСУ, включающая и ПК и контроллеры, рассматривается как один проект. Поэтому каждый узел (ПК или контроллер) имеет информацию об остальных узлах системы и в случае его модификации автоматически обновляет соответствующие базы на других узлах. При этом АСУ можно создавать как в архитектуре клиент-сервер, так и распределенную – технология разработки АСУТП как единого проекта будет одинаково эффективна.
«Автопостроение» – это группа оригинальных технологий, реализованных в ТРЕЙС МОУД 5. Суть автопостроения заключается в автоматическом генерировании баз каналов операторских станций и контроллеров, входящих в проект АСУТП на основе информации о числе точек ввода /вывода, номенклатуре используемых контроллеров и УСО, наличии и характере связей между ПК и контроллерами. [9]
Технология автопостроения является революционным шагом в разработке систем реального времени, так как снимает огромную часть рутинной работы по «набивке» и конфигурированию баз параметров. Благодаря автопостроению разработка АСУТП сводится к следующим несложным процедурам:
- Размещение в рабочем поле редактора базы каналов иконок контроллеров и операторских станций.
- Указание наличия информационного обмена между узлами.
- Запуск автопостроения проекта.
- Задание математической обработки данных и алгоритмов управления.
ТРЕЙС МОУД позволяет создавать многоуровневые, иерархически организованные, резервированные АСУТП. Рассмотрим трехуровневую систему, включающую уровень контроллеров, диспетчерский уровень и административный уровень.
АСУТП уровня контроллеров создается на основе Микро-монитора реального времени (Микро-МРВ). Эта программа размещается в РС-контроллере и осуществляет сбор данных с объекта, программно-логическое управление технологическими процессами и регулирование параметров по различным законам, а также ведение локальных архивов. Программа ведет постоянный контроль работоспособности УСО, сетевых линий, и в случае их выхода из строя автоматически переходит на резервные средства. При помощи Микро-МРВ можно создавать дублированные или троированные системы с горячим резервом.
Основу диспетчерского уровня управления составляют Мониторы реального времени (МРВ). МРВ ТРЕЙС МОУД – это сервер реального времени, осуществляющий прием данных с контроллеров, управление технологическим процессом, перераспределение данных по локальной сети, визуализацию информации, расчет ТЭП и статистических функций, ведение архивов.
На административном уровне АСУ ТП используются модули Supervisor. Supervisor предоставляет руководителю информацию о ходе и ретроспективе технологического процесса, статистических и технико-экономических параметрах предприятия. Эта информация может обновляться в режиме, близком к реальному времени (задержка 10 – 30 с). Кроме того, Supervisor дает возможность просматривать ретроспективу (осуществлять «плейбек») процесса как фильм на видеомагнитофоне. Графический «плейбек» архива дает в руки руководителя инструмент контроля работы диспетчерского комплекса и всего предприятия в целом. [4]
ТРЕЙС МОУД – одна из немногих на российском рынке SCADA-систем для операционных систем общего назначения, обладающих системой единого сетевого времени (кроме нее еще Citect). Все процессы в сетевых комплексах ТРЕЙС МОУД автоматически синхронизируются, что позволяет однозначно привязывать технологические события к временной шкале, каким бы из 256 сетевых ПК они не были зафиксированы.
SCADA-система SIMATIC WinCC
SCADA-система WinCC разработана компанией Siemens.
В настоящее время этот программный продукт занимает первое место в Европе среди SCADA-систем и третье место в мире. В 1999 году появилась пятая версия этой системы. Она базируется на операционных системах Windows 95/98/NT, является открытой и масштабируемой.
Открытость WinCC поддерживается на всех уровнях работы системы за счет использования открытых интерфейсов и доступности внутренних структур.
Обмен данными с другими приложениями осуществляется при помощи механизмов DDE, OLE, ODBC/SQL, с контроллерами – при помощи ОРС. При отсутствии в WinCC нужного драйвера для выбранного ПЛК разработчик может создать свой драйвер, используя Channel Development Kit (CDK).
WinCC предлагает максимум возможностей разработчику для написания своих дополнений. Разработчик получает доступ к внутренним структурам, процедурам и функциям компонентов системы. Описание этих функций поставляется специально отдельной опцией Open Development Kit (ODK).
В WinCC реализована возможность просмотра состояния объекта через Internet с помощью WinCC Web Navigator Server.
Система WinCC может использоваться как в однопользовательском варианте, так и в клиент-серверном. К WinCC-серверу, принимающему данные с ПЛК, может быть подключено до 16 WinCC-клиентов. В WinCC 5.0 поддерживается до 6 серверов.
Использование новаторских программных технологий WinCC основывается на новейших разработках и методах в области программного обеспечения. Тесное сотрудничество с Microsoft гарантирует, что пользователь спокойно может ожидать нововведений и в будущем.
Уже базовая система WinCC предоставляет все компоненты и функции, которые необходимы для решения также и сложных задач визуализации. Редакторы для создания изображений, сценариев, аварийных сообщений, графиков, отчетов являются фиксированной составной частью системы WinCC.
Масштабирование от простых до сложных задач WinCC – это модульный и гибко расширяемый блок автоматизации для простых применений в машиностроении вплоть до сложных многопользовательских приложений или даже распределенных систем с несколькими серверами в сложных промышленных системах. [4]
Простое проектирование, поддерживаемое модулями оперативной помощи также и в режиме online В среде WYSIWYG в распоряжении проектировщика наряду с простыми диалогами, ассистентами (мастерами) имеются также обширные библиотеки. Программное обеспечение WinCC полностью рассчитано на многоязычное использование. Например, можно выбирать между немецким, английским и французским языком или же между различными азиатскими языками. Возможность использования по всему миру благодаря переключению языков в режиме online Для переключения языков в режиме online могут храниться тексты на любых языках, так как WinCC спроектирован для эксплуатации в странах с различными языками.
WinCC – это открытая система визуализации процессов, которая находит применение почти во всех отраслях. WinCC состоит из модулей, может гибко расширяться и делает возможными как простые однопользовательские применения в машиностроении, так и сложные многопользовательские решения и даже распределенные системы с несколькими серверами и мультиклиентами в сложных промышленных системах.
WinCC поддерживает многообразие способов проектирования и при этом открыт так, что ничто не препятствует индивидуальной разработке проектов и изображений. Благодаря этому проекты и изображения, которые могут быть разработаны на основе WinCC, очень разнообразны и могут быть использованы для непосредственного изображения машин путем визуализации установки и вплоть до очень сложных технологических процессов с соответствующими изображениями. [9]
С помощью WinCC имеется возможность проектировать визуализацию нейтрально не только по отношению к технологии, но и по отношению к отрасли, т.е. объединить в одной системе автоматизацию производства и процессов. WinCC доказывает это, ссылаясь на свои применения в следующих отраслях:
· резиновая и каучуковая промышленность
· автомобилестроение
· производство продуктов питания, молочная промышленность
· производство и переработка бумаги
· производство энергии
· очистка сточных вод
· химическая и фармацевтическая промышленность
· производство стали
· машиностроение и производство комплектного промышленного оборудования
Состав АСУ
АСУ состоит из основы и функциональной части. Основу АСУ составляют информационная база, техническая база, математическое обеспечение, организационно-экономическая база. Основа - общая часть для всех задач, решаемых АСУ. В составе большинства АСУ принято выделять функциональную и обеспечивающую части.
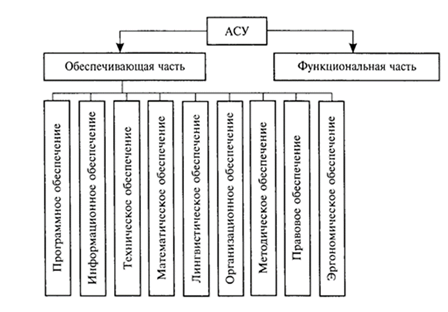
Рисунок 2 – Подсистемы АСУ
Информационная база АСУ
Информационная база АСУ - размещенная на машинных носителях информации совокупность всех данных, необходимых для автоматизации управления объектом или процессом. Обычно информационная база делится на три массива: генеральный, производный и оперативный. Конструкция массивов и их полей (способы размещения на носителях, особенности взаимосвязи данных внутри массива, конкретная компоновка данных и т.д.) определяется типом АСУ и общими характеристиками объектов, для которых она предназначается. [5] Однако целесообразно сохранять типовое конструктивное построение информационной базы для общего класса объектов (например, для машиностроительных предприятий). Генеральный массив объединяет данные, являющиеся общими для всех задач, размещение которых отвечает универсальной структуре, не ориентированной на выполнение какой-либо одной функции управления. Генеральный массив для крупного объекта содержит сотни миллионов символов, занимает большие объёмы запоминающих устройств и не всегда удобен для использования в каждой конкретной задаче, требующей для своего решения специализированной информации. Эта проблема осложняется при мультипрограммной обработке данных и недостаточно ёмких оперативных запоминающих устройствах, предполагающих хранение многих массивов в машинных архивах (лентотеках, картотеках), функционально разобщённых с процессорами. В связи с этим в реально функционирующих АСУ возникает необходимость формирования производных массивов, отражающих специфику структуры объекта, особенности выполняемых в каждый период функций, частоту повторяемости различных задач и ряд др. факторов, связанных с текущей работой системы. Все производные массивы, как правило, формируются из генерального массива. Всякое устойчивое изменение характеристик обслуживаемого объекта должно быть отражено в генеральном массиве. Оперативный массив охватывает текущую информацию, а также промежуточные результаты вычислений. В нём же размещается первичная информация о состоянии обслуживаемого объекта, поступающая периодически по каналам связи или записанная на автономных носителях (перфолентах, перфокартах, магнитных лентах и т.д.). [3] Обработанные и обобщённые данные могут затем вноситься в производный и генеральный массивы либо непосредственно выдаваться потребителю.
Техническая база АСУ
Техническая база АСУ включает средства обработки, сбора и регистрации, отображения и передачи данных, а также исполнительные механизмы, непосредственно воздействующие на объекты управления (например, автоматические регуляторы, датчики и т.д.), обеспечивающие сбор, хранение и переработку информации, а также выработку регулирующих сигналов во всех контурах автоматизированного управления производством. Основные элементы технической базы - ЭВМ, которые обеспечивают накопление, хранение и обработку данных, циркулирующих в АСУ. ЭВМ позволяют оптимизировать параметры управления, моделировать производство, подготавливать предложения для принятия решения. [7] Обычно выделяют два класса ЭВМ, используемых в АСУ: информационно-расчётные и учётно-регулирующие. Информационно-расчётные ЭВМ находятся на высшем уровне иерархии управления (например, в координационно-вычислительном центре завода) и обеспечивают решение задач, связанных с централизованным управлением объектом по основным планово-экономическим, обеспечивающим и отчётным функциям (технико-экономическое и оперативно-производственное планирование, материально-техническое снабжение, сбыт продукции и т.д.). Они характеризуются высоким быстродействием, наличием системы прерываний, слоговой обработкой данных, переменной длиной слова, мультипрограммным режимом работы и т.д., а также широким набором и большим объёмом запоминающих устройств (оперативных, буферных, внешних, односторонних и двусторонних, с произвольным и последовательным доступом). В СССР в 70-х гг. в качестве типовых информационно-расчётных ЭВМ для АСУ принята единая система ЭВМ (ЕС ЭВМ). Учётно-регулирующие ЭВМ, как правило, относятся к нижнему уровню управления. Они размещаются обычно в цехах или на участках и обеспечивают сбор информации от объектов управления (станков, складов и т.д.), первичную переработку этой информации, передачу данных в информационно-расчётную ЭВМ и получение от неё директивно-плановой информации, осуществление локальных расчётов (например, расписания работы каждого станка и рабочего, графика подачи комплектующих изделий и материалов, группировки деталей в партии, режимов обработки и т.д.) и выработку управляющих воздействий на объекты управления при отклонении режимов их функционирования от расчётных. [2] Особенность учётно-регулирующих ЭВМ - хорошо развитая система автоматического сопряжения с большим числом источников информации (датчиков, регистраторов) и регулирующих устройств. Их вычислительная часть менее развита, поскольку первично обработанная информация передаётся в ЭВМ верхнего уровня для дальнейшего использования и длительного хранения. Примеры учётно-регулирующих ЦВМ - "Днепр" и М-6000.
Средства сбора и регистрации данных при участии человека включают различные регистраторы производства, с помощью которых осуществляются сбор и регистрация данных непосредственно на рабочих местах (например, в цехе, на участке, станке), а также датчики (температуры, количества изготовленных деталей, времени работы оборудования и т.д.), фиксаторы нарушений установленного технологического и организационного ритма (отсутствие заготовок, инструмента, материалов, неправильная наладка станков, отсутствие транспортных средств для отправки готовой продукции и т.д.). Например, типовыми регистраторами производства являются устройства РИ-7501 (цеховой регистратор) и РИ-7401 (складской регистратор). [6]
Средства отображения информации предназначены для представления результатов обработки информации в удобном для практического использования виде. К ним относятся различные печатающие устройства, пишущие машины, терминалы, экраны, табло, графопостроители, индикаторы и т.п. [1] Эти устройства, как правило, непосредственно связаны с ЭВМ или с регистраторами производства и выдают либо регулярную (регламентную), либо эпизодическую (по запросу или в случае аварийной ситуации) справочную, директивную или предупредительную информацию.
Аппаратура передачи данных осуществляет обмен информацией между различными элементами АСУ (между регистраторами производства и ЭВМ, между координационно-управляющим центром и цеховыми ЭВМ и т.д.), а также между АСУ и смежными управления уровнями (например, между АСУП и ОАСУ, между территориальными вычислительными центрами).
К технической базе АСУ относят также средства оргтехники (копировально-множительную технику, картотеки, диктофоны и т.д.), а также вспомогательные и контрольно-измерительные средства, обеспечивающие нормальное функционирование основных технических средств в требуемых режимах. [2]
Математическое обеспечение АСУ
Математическое обеспечение АСУ - комплекс программ регулярного применения, управляющих работой технических средств и функционированием информационные базы и обеспечивающих взаимодействие человека с техническими средствами АСУ. Математическое обеспечение условно можно подразделить на систему программирования, операционную систему, общесистемный комплекс и пакеты типовых модулей.
Система программирования обеспечивает трансляцию программы решения задачи, выраженной на удобном для человека формализованном языке, на машинный язык, её отладку, редактирование и включение в пакет программ для обработки. В систему программирования входят описания языков программирования, комплекс трансляторов, библиотека стандартных подпрограмм, программы редактирования связей, наборы программ, осуществляющих преемственность (программную) ЭВМ различных типов. [7] Кроме того, система программирования обычно содержит в своём составе набор программ, облегчающих взаимодействие пользователя с машиной и позволяющих системе программирования развиваться в зависимости от характера задач, решаемых потребителем. В качестве типовых языков программирования для АСУ в СССР приняты алгол-68, фортран, кобол, универсальный язык высшего уровня ПЛ-1, а также машинно-ориентированные языки типа "Ассемблера".
Операционные системы обеспечивают функционирование всех устройств ЭВМ в требуемых режимах и выполнение необходимой последовательности заданий на реализацию различных процедур управления. Операционные системы, как правило, являются неотъемлемой составной частью тех вычислительных средств, которые входят в состав АСУ. [6] Однако в ряде случаев при проектировании АСУ приходится расширять операционные системы для обеспечения специальных системных требований (например, при подключении к системе специфичных для управляемого процесса регистраторов и систем отображения, при организации диалоговых режимов между терминалами и центральным вычислительным комплексом). В этой связи очень важной составной частью операционной системы АСУ является т. н. генератор систем. Это - программа, которая не входит в состав активной части управляющих программ и не связана непосредственно с процессом вычислений, но с помощью которой можно автоматически генерировать комплекс управляющих программ для системы любой конфигурации. Такой метод оказывается особенно эффективным при использовании ЭВМ в широком диапазоне АСУ на различных уровнях и на различных объектах, когда состав ЭВМ и состав решаемых задач может быть существенно различным.
Общесистемный комплекс охватывает набор программ, управляющих работой вычислительной системы и периферийных устройств (регистраторов, средств отображения результатов обработки данных и т.д.). Этот комплекс содержит программы совместной работы нескольких ЭВМ, комплексируемых по различным уровням запоминающих устройств, программы обслуживания каналов связи, дистанционные решения задач в режиме разделения времени, разграничения доступа к информационным массивам и др. К общесистемным комплексам относят также информационно-поисковые системы, осуществляющие целенаправленный поиск требуемых массивов (или формирование необходимых массивов из фрагментов данных), их редактирование и выдачу потребителю в заданной форме (либо передачу этих массивов в запоминающее устройство для использования очередными рабочими программами). К ним же относят программы обслуживания средств, работающих в реальном масштабе времени, а также обслуживания терминальных устройств и средств отображения информации. [8]
Пакеты типовых прикладных модулей (стандартных подпрограмм) могут использоваться в различных комбинациях при решении той пли иной функциональной задачи. Типовыми, например, являются прикладные модули сортировки данных, статистической обработки информации, обработки сетевых графиков планирования и управления, моделирования реальных процессов и др. К математическому обеспечению АСУ часто относят также программы функционального анализа системы, обеспечивающие удобство эксплуатации и совершенствования системы.
Функциональная часть АСУ
Функциональная часть АСУ состоит из набора взаимосвязанных программ для реализации конкретных функций управления (планирование, финансово-бухгалтерскую деятельность и др.). Все задачи функциональной части базируются на общих для данной АСУ информационных массивах и на общих технических средствах. Включение в систему новых задач не влияет на структуру основы и осуществляется посредством типового для АСУ информационного формата и процедурной схемы. Функциональную часть АСУ принято условно делить на подсистемы в соответствии с основными функциями управления объектом. Подсистемы в свою очередь делят на комплексы, содержащие наборы программ для решения конкретных задач управления в соответствии с общей концепцией системы. Состав задач функциональной части АСУ определяется типом управляемого объекта, его состоянием и видом выполняемых им заданий. [7] Структура функциональной части АСУ зависит от схемы процедур управления, определяющей взаимосвязь всех элементов управления и охватывающей автоматизированные, частично механизированные и ручные процедуры. Функциональная часть более мобильна, чем основа, и допускает изменение состава и постановки задач при условии обеспечения стандартного сопряжения с базовыми элементами системы. [6]
Структура АСУ ТП
В производственных АСУ ТП системы обычно строятся по трехуровневому принципу.
Нижний уровень (полевой уровень, field) АСУ ТП представляет собой различные датчики (сенсоры) и исполнительные механизмы.
На нижнем уровне система решает следующие основные задачи:
- сбор первичной информации с исполнительных узлов БСУ;
- анализ собранной информации;
- отработка логики технологического процесса при производстве бетона с учетом всех современных требований;
- выдача управляющих воздействий на исполнительные устройства.
Средний уровень (уровень контроллеров) состоит из программируемых логических контроллеров (ПЛК, в англоязычной литературе - PLC). Он как раз принимает полевые данные и выдает команды управления на нижний уровень. Управление в ПЛК осуществляется по заранее разработанному алгоритму, который исполняется циклически (прием данных – обработка – выдача управляющих команд). [8]
Верхний уровень - это уровень визуализации, диспетчеризации (мониторинга) и сбора данных. На этом уровне задействован человек, т.е. оператор (диспетчер). Если он осуществляет контроль локального агрегата (машины), то для его осуществления используется так называемый человеко-машинный интерфейс (HMI, Human-Machine Interface). Если оператор осуществляет контроль за распределенной системой машин, механизмов и агрегатов, то для таких диспетчерских систем часто применим термин SCADA (Supervisory Control And Data Acqusition - диспетчерское управление и сбор данных, англ.) В обоих случаях верхний уровень АСУ ТП обеспечивает сбор, а также архивацию важнейших данных от ПЛК, их визуализацию, т.е. наглядное (в виде мнемосхем, часто анимированных) представление на экране существо и параметры происходящего процесса. При получении данных система самостоятельно сравнивает их с граничными параметрами (уставками) и при выходе за границы уведомляет оператора с помощью тревог. Оператор, который для начала работы должен авторизоваться (зарегистрироваться), запускает технологический процесс, имеет возможность остановить его полностью или частично, может изменить режимы работы агрегатов (изменяя уставки) и т.п. При этом система записывает все происходящее, включая действия оператора, обеспечивая "разбор полетов" в случае аварии или другой нештатной ситуации. Тем самым обеспечивается персональная ответственность управляющего оператора. [8]
На верхнем уровне система решает другие задачи:
- визуализация основных технологических параметров с БСУ (состояние исполнительных органов, ток потребления миксера, вес дозируемых материалов и т.д.);
- архивирование всех параметров процесса производства бетона;
- выдача команд на воздействие исполнительными органами БСУ;
- выдача команд на изменение параметров внешних воздействий;
- разработка и хранение рецептур бетонных смесей.

Рисунок 3 – Типовая структура современной промышленной АСУ ТП
Внедрение автоматизированной системы управления предприятием , как и любое серьезное преобразование на предприятии, является сложным и зачастую болезненным процессом. Тем не менее, некоторые проблемы, возникающие при внедрении системы, достаточно хорошо изучены, формализованы и имеют эффективные методологии решения. Заблаговременное изучение этих проблем и подготовка к ним значительно облегчают процесс внедрения и повышают эффективность дальнейшего использования системы. [6]
Заключение
Таким образом, внедрение АСУ не следует рассматривать как законченную работу по автоматизации управления. Система должна обладать свойствами адаптивности, т.е. способностью приспосабливаться к изменению внешних условий и соответственно к решению новых задач. Без этого функционирование АСУ не может быть максимально эффективным.
При разработке видов обеспечения АСУ следует учитывать также их взаимосвязь и направленность на достижение конечной цели разрабатываемой системы, а также способность практической реализации на единых технических средствах.
Библиографическая ссылка
Линьков В.А. ЦЕНТРАЛИЗОВАННЫЕ АСУ ТП. СОСТАВ И СТРУКТУРА АСУ ТП // Международный студенческий научный вестник. – 2019. – № 6. ;URL: https://eduherald.ru/ru/article/view?id=19847 (дата обращения: 23.04.2024).