

MEMS акселерометры получили широкое распространение в системах ориентации и управления различных мобильных объектов. При этом вопросы повышения точности и стабильности показаний датчиков приобретают первостепенное значение [1]. Вопросам моделирования и анализа погрешностей посвящен ряд работ [2, 3]. В то же время актуальной является процедура идентификации статических характеристик преобразующей системы MEMS-акселерометра.
Исходные данные. В работе [4] рассматривается задача идентификация погрешностей акселерометра в стохастической формулировке. В таком случае реакция акселерометра на ускорение свободного падения g представляется как точка в трехмерном пространстве, где облако точек образует трехосный эллипсоид.
Идентификация параметров эллипсоида чувствительности по неполным данным. Интересным на практике предоставляется случай идентификации параметров эллипсоида при неполных данных, когда облако точек  покрывает не все квадранты эллипсоида. Также ставятся задачи определения зависимости точности идентификации от количества точек и от усеченности облака.
покрывает не все квадранты эллипсоида. Также ставятся задачи определения зависимости точности идентификации от количества точек и от усеченности облака.
Результаты имитационного моделирования в случае усеченности облака представлены на рис. 1 и в табл. 1.
Таблица 1
Оценки полуосей эллипсоида для усеченного облака точек
|
|
|
|
|
|
|
1.0090 |
0.5079 |
0.5045 |
|
|
1.0296 |
0.5000 |
0.5097 |
|
|
1.0372 |
0.4332 |
0.5050 |
|
|
1.0089 |
0.3374 |
0.5239 |







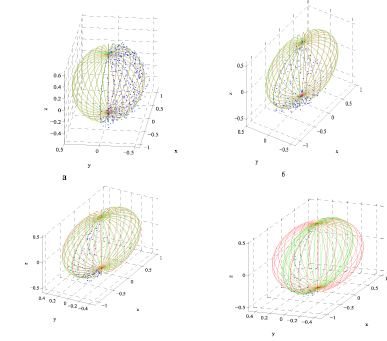
Рис. 1. Визуализация зашумленного облака точек на фоне эллипсоида чувствительности: а –  ; б –
; б –  ; в –
; в –  ; г –
; г – 
Для оценки ошибки идентификации от усеченности облака были проведены десятикратные серии имитационных экспериментов по полному облаку точек,  ,
,  ,
,  и
и  долей облака.
долей облака.
Результаты имитационного моделирования в случае разреженного облака точек представлены на рис. 2 и в табл. 2. В строках таблицы приведены оценки величин полуосей эллипсоида в зависимости от количества точек облака.
Таблица 2
Оценки полуосей эллипсоида для разреженного облака точек
|
|
|
|
|
|
529 точек |
0.9975 |
0.5004 |
0.5155 |
|
256 точек |
1.0215 |
0.5079 |
0.5144 |
|
121 точка |
0.9790 |
0.5008 |
0.5186 |
|
64 точки |
1.0368 |
0.4782 |
0.5155 |



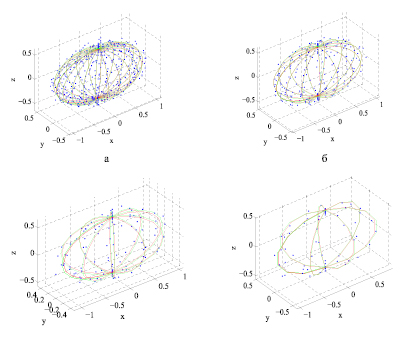
Рис. 2. Визуализация зашумленного облака точек на фоне эллипсоида чувствительности: а –529 точек, б –256 точек, в –121 точка, г – 64 точки
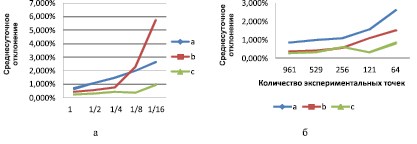
Рис. 3. Зависимость среднеквадратичного отклонения ошибки полуосей эллипсоида: а – как функции долей облака точек данных; б – как функции числа точек облака данных
Для оценки ошибки идентификации от количества точек были проведены десятикратные серии имитационных экспериментов по 961, 529, 256, 121 и 64 точкам облака данных.
На рис. 3,а показана зависимость среднеквадратичного отклонения ошибки полуосей эллипсоида как функции долей облака точек данных. Видно, что при большем усечении облака значение ошибки увеличивается. Результаты имитационного моделирования показывают, что для облака данных  различной усеченности метод дает приемлемую погрешность порядка 1–2 %. В случае
различной усеченности метод дает приемлемую погрешность порядка 1–2 %. В случае  значение СКО оценки величины полуоси
значение СКО оценки величины полуоси  значительно возрастает, что говорит о нецелесообразности дальнейшего усекания облака точек. На рис. 3,б показана зависимость среднеквадратичного отклонения ошибки полуосей эллипсоида как функции числа точек облака данных. Видно, что при уменьшении количества точек облака данных значение ошибки увеличивается. Результаты имитационного моделирования показывают, что для облака данных
значительно возрастает, что говорит о нецелесообразности дальнейшего усекания облака точек. На рис. 3,б показана зависимость среднеквадратичного отклонения ошибки полуосей эллипсоида как функции числа точек облака данных. Видно, что при уменьшении количества точек облака данных значение ошибки увеличивается. Результаты имитационного моделирования показывают, что для облака данных  различной плотности метод дает приемлемую погрешность порядка 1–3 %.
различной плотности метод дает приемлемую погрешность порядка 1–3 %.
Заключение. Рассмотренная процедура идентификации параметров эллипсоида чувствительности MEMS-акселерометра по неполному облаку точек показала работоспособность метода. Полученные оценки соответствуют по точности оценкам с полным облаком точек, а среднеквадратичное отклонение оценки ошибки идентификации от количества точек и от усеченности облака составляет 1–3 %. Получены экспериментальные данные реального MEMS-акселерометра. Облако точек приближено к сфере со смещенным центром, что обусловлено конструкционными особенностями датчика.
Библиографическая ссылка
Горянина К.И., Вернези М.А. МОДЕЛИРОВАНИЕ ПРОЦЕДУРЫ ИДЕНТИФИКАЦИИ ПОГРЕШНОСТЕЙ MEMS АКСЕЛЕРОМЕТРОВ // Международный студенческий научный вестник. – 2018. – № 3-3. ;URL: https://eduherald.ru/ru/article/view?id=18314 (дата обращения: 27.04.2024).