

Развитие техники в современном мире заставляет инженеров решать самые разнообразные задачи: расчет сооружений, проектирование машин, двигателей и таких объектов как самолеты, тепловозы, космические корабли и т.п. Решение этих проблем имеет общую научную базу из-за того, что в данных задачах присутствуют вопросы, которые требуют изучения законов движения или равновесия тел. [1]
В механике довольно часто осуществляется взаимодействие с векторными объектами, такими как скорость, ускорение, сила и т.д. И чаще всего приходится работать не с отдельными векторами, а составлять систему. Например, сумму сил, действующих на твердое тело можно представить как единый объект-множество векторов, показывающих эти силы. [2]
Вследствие этого задачи такого рода вызывают потребность включить в обычные законы векторной алгебры, определенные законы, отображающие преобразование множеств систем векторов. Формирование таких законов становится невозможным без ограничений на рассматриваемые множества. Это должны быть достаточно обширные ограничения, так как они обязаны охватывать важные множества векторов, которые появляются в задачах механики и являются достаточно жесткими, чтобы можно было установить общие закономерности для выделяемого ими класса множеств.
В курсе элементарной физики, электронике, радиотехнике и других прикладных науках изучаются величины, которые можно разделить на два вида. Одни из них вполне определяются числом (длина, площадь, объем, масса, температура и др.), а другие определяются не только числом, но еще и направлением (сила, скорость, ускорение, ток, напряжение и др.).
Величина, полностью характеризуемая своим числовым значением в выбранной системе единиц, называется скалярной или скаляром (от лат. «Scala» – шкала).
Величина, которая, кроме числового значения, характеризуется еще и направлением, называется векторной или вектором (от лат. «Vector» – несущий). Над векторами производят действия, называемые сложением, вычитанием и умножением векторов. Эти действия имеют много общих свойств с обычными алгебраическими действиями сложения, вычитания и умножения. Поэтому раздел высшей математики, в котором изучаются действия над векторами называется векторной алгеброй
Для того чтобы рассмотреть взаимосвязь векторной алгебры и механики, нам необходимо дать определения вектора в математике и механике. В математике вектор – это направленный отрезок, в механике – это величина, которая характеризуется направлением, числовым значением (модулем) и точкой приложения. [3]
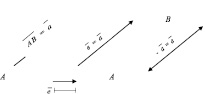
Вектор изображается ориентированным (направленным) отрезком, одна из его ограничивающих точек (А) которого есть начало, а другая (В) – конец вектора (рисунок). В этом случае вектор обозначают  или
или  жирной буквой (в лекциях
жирной буквой (в лекциях  ).
).
линейный масштаб
Изображение векторов
Расстояние между началом и концом вектора называется длиной (модулем) вектора. Модуль вектора обозначают  или
или  . В математике векторы обычно считаются безразмерными, а модуль такого вектора – безразмерным числом.
. В математике векторы обычно считаются безразмерными, а модуль такого вектора – безразмерным числом.
В дальнейшем мы будем рассматривать, так называемые, свободные векторы, начало которых при параллельном переносе самого вектора можно помещать в любую точку пространства. В частности для свободных векторов можно обеспечить общую их начальную точку .
Вектор, модуль которого равен нулю (начало совпадает с концом), называется нулевым или нуль-вектором  (направление его считается произвольным).
(направление его считается произвольным).
Векторы, параллельные одной прямой, называются коллинеарными .
Векторы, расположенные в одной плоскости или параллельные одной и той же плоскости, называются компланарными .
Два вектора называются ортогональными, если они взаимно перпендикулярны.
Два вектора называются равными, если они имеют одинаковую длину и одинаковое направление ( ).
).
Если дан вектор  , то вектор
, то вектор  называется противоположным вектором к вектору
называется противоположным вектором к вектору  и обозначается –
и обозначается –  .
.
Вектор, модуль которого равен единице, называется единичным (или ортом). Обычно он обозначается  .
.
Линейными операциями над векторами называют сложение (вычитание) векторов и умножение вектора на число
2.1. Сложение векторов.
Суммой векторов  и
и  называется вектор
называется вектор  , соединяющий начало вектора
, соединяющий начало вектора  с концом вектора
с концом вектора  при условии, что к концу вектора
при условии, что к концу вектора  приставлено начало вектора
приставлено начало вектора  (правило треугольников).
(правило треугольников).
Обозначение: 
Сумма двух векторов  , приведенных к общему началу 0, есть вектор-диагональ
, приведенных к общему началу 0, есть вектор-диагональ  параллелограмма 0АСВ, построенного на векторах (правило параллелограмма).
параллелограмма 0АСВ, построенного на векторах (правило параллелограмма).
Сложение нескольких векторов на плоскости производится при помощи последовательного применения правила треугольника. В результате этого получается результирующий вектор, который направлен из начала первого вектора суммы к концу последнего (правило многоугольника).
При сложении трех векторов, не лежащих в одной плоскости (в пространстве), применяется правило параллелепипеда: сумма трех таких векторов 0А, 0В, 0С, приведенных к общему началу 0 представляет собой вектор-диагональ 0Д параллелепипеда, построенного на слагаемых векторах
Для любых векторов  и
и  справедливо неравенство треугольника
справедливо неравенство треугольника
 .
.
Вычитание векторов.
Вычитание векторов определяется как операция, обратная сложению.
Разностью двух векторов  и
и  называется такой вектор
называется такой вектор  который нужно сложить с вектором
который нужно сложить с вектором  , чтобы получить вектор
, чтобы получить вектор  .
.
При этом возможны те же два способа (правила) вычитания векторов: правило треугольника и правило параллелограмма.
Умножение вектора на число (скаляр).
Произведением вектора  на число λ называется вектор
на число λ называется вектор  , модуль которого равен произведению модуля вектора
, модуль которого равен произведению модуля вектора  на модуль числа λ, а направление совпадает с направлением вектора
на модуль числа λ, а направление совпадает с направлением вектора  , если λ > 0 и противоположно направлению вектора
, если λ > 0 и противоположно направлению вектора  , если λ < 0.
, если λ < 0.
При λ = 0, или  считают вектор
считают вектор  нулевым. Из приведенных выше определений вытекают следующие свойства линейных операций:
нулевым. Из приведенных выше определений вытекают следующие свойства линейных операций:
1.  (переместительность сложения векторов – коммутативность).
(переместительность сложения векторов – коммутативность).
2.  (сочетательность сложения векторов – ассоциативность).
(сочетательность сложения векторов – ассоциативность).
3.  (существование противоположного вектора).
(существование противоположного вектора).
4.  (существование нулевого вектора).
(существование нулевого вектора).
5. 
6)  (ассоциативность умножения на число).
(ассоциативность умножения на число).
7.  (распределительность или дистрибутивность умножения векторов на числа относительно сложе-ния векторов).
(распределительность или дистрибутивность умножения векторов на числа относительно сложе-ния векторов).
8.  (дистрибутивность умножения векторов на числа относительно сложения чисел).
(дистрибутивность умножения векторов на числа относительно сложения чисел).
Теперь рассмотрим задачу:
На трубу AB насажены колесо 1 (с центром в точке C) и колесо 2 (с центром в точке D). Расстояния AC = 100, CD = 300, DB = 100, d1 = 300 мм, d2 = 100 мм. Определить силы F2, если Fr2 = 0,4F2, и реакции опор А и В, если F1 = 100Н.
Решение:
1. Изобразим на рисунке тело, равновесие которого рассматривается, укажем все действующие на него силы, а также оси координат.
2. Определим значения F1 и Fr2. Из условия равновесия тела, имеющего ось имеем:


3. Следующим шагом составим шесть уравнений равновесия:
 (1)
(1)
 (2)
(2)
 (3)
(3)
 (4)
(4)
 (5)
(5)

4. Решив уравнения 1-4, определим реакции опор:
Из (1): 
Из (2): 
Из (3): 
Из (4): 
5. Проверим правильность решения, используя уравнения 5 и 6:

Отсюда следует, что реакции RAX и RBX найдены верно.


Отсюда следует, что реакции RAY и RBY найдены верно.
Библиографическая ссылка
Сырман А.В., Ревегук Ю.А. ЗАКОНЫ ВЕКТОРНОЙ АЛГЕБРЫ И ИХ ПРИМЕНЕНИЕ В МЕХАНИКЕ // Международный студенческий научный вестник. – 2017. – № 4-4. ;URL: https://eduherald.ru/ru/article/view?id=17438 (дата обращения: 20.09.2024).