

Введение
Одной из ключевых отраслей экономического развития многих стран мира, в том числе и Российской Федерации, традиционно считается сельское хозяйство. Основной задачей сельского хозяйства является обеспечение населения продуктами питания, а лёгкую промышленность - качественным сырьём. На сельское хозяйство приходится свыше 12% валового общественного продукта и более 15% национального дохода России, а также сосредоточение более 16% производственных основных фондов [15]. Около восьмидесяти отраслей промышленности России задействовано в поставке своей продукции сельскому хозяйству, которое, в свою очередь, обеспечивает готовой продукцией или сырьём более шестидесяти отраслей промышленности [24]. Сельскохозяйственное производство - это одно из наиболее значимых звеньев агропромышленного комплекса России и многих стран мира. Оно сочетает в себе механизмы по выращиванию, производству и переработке сельскохозяйственной продукции, сырья и продовольствия [7].
Сельское хозяйство входит в состав агропромышленного комплекса, одной из основных отраслей которого является сельскохозяйственное машиностроение, которое служит для механизации и оптимизации не только ключевых, но и промежуточных процессов производства сельскохозяйственной продукции [11]. Прогресс сельскохозяйственного машиностроения оказывает одно из наиболее решающих влияний на эффективность сельского хозяйства и всего агропромышленного комплекса в целом. Данная область машиностроения имеет потребительский фактор размещения и для сокращения логистических издержек сосредоточена в главных сельскохозяйственных регионах мира, где одно из ведущих позиций занимает Россия. Развитые страны, добившиеся высочайшего прогресса в области механизации сельского хозяйства, уделяют особое внимание повышению качества сельскохозяйственной техники и её технологическим возможностям, что несомненно позволяет оптимизировать и автоматизировать производство, при этом значительно повысив его эффективность [26].
Очевидно, что высокая степень механизации труда служит залогом роста объёмов и качества производимой сельхозпродукции. Отсутствие в отрасли современного оборудования препятствует развитию не только отрасли сельского хозяйства, но и замедляет рост всего экономического развития страны [9]. В силу ежегодно возрастающих потребностей населения фермеры нуждаются в более качественной и надёжной сельхозтехнике, а производители в свою очередь стремятся к сокращению издержек и улучшению технических характеристик выпускаемых машин [16]. Ключевым направлением в современном сельскохозяйственном машиностроении является разработка таких видов машин, которые позволят применять высокоэффективные технологии, значительно увеличат производительность труда, обеспечат экологическую безопасность и безопасные условия труда [8]. Одним из важнейших технических узлов, влияющих на производительность зерноуборочной техники, является привод ножей. Поэтому, модернизируя эту часть механизма, можно увеличить производительность сельскохозяйственной единицы в целом.
Анализ структуры известных механизмов приводов
Разработки, применяемые на отечественных образцах зерноуборочной техники
В конструкциях приводов используются как плоские кинематические цепи, так и пространственные, организованные по типу механизмов с разным числом наложенных связей [23, 27, 28], так и без них [30, 31], либо комбинированные схемы [16, 18, 21, 29]. Рассмотрим известные механизмы приводов, используемые на современных образцах сельскохозяйственной техники. Основные российские и зарубежные производители используют несколько модификаций. К ним относится кривошипно-шатунный механизм, кинематическая схема которого приведена на рисунке 1.
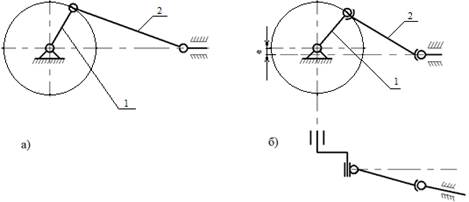
Рисунок 1 - Кривошипно-шатунный аксиальный плоский (а) и дезаксиальный пространственный(б) механизмы привода ножа
Плоский кривошипно-шатунный механизм применяется в системах зерноуборочных комбайнов, в то время как пространственный преимущественно у косилок. Основными звеньями данного типа механизма являются: кривошип 1, совершающий вращательное движение, и шатун 2, совершающий плоско - параллельное движение. Принцип работы механизма заключается в следующем: ведущий шкив передачи приводится в движение от вала отбора мощности комбайна, при этом колебательное движение ножу передаётся при помощи шатуна, ведомого кривошипом. Такие привода имеют ряд недостатков, связанных с их конструктивными особенностями. Основными считаются высокий уровень вибрации машины, возникающий от неуравновешенности механизма привода, также невысокие эксплуатационно-технологические показатели, отсутствие возможности остановки ножа без отключения привода. Схема кривошипно-ползунного механизма привода также не предусматривает установку двух ножей для обеспечения скоростной уборки стеблевых культур. Для установки второго ножа потребуется установка второго привода соответственно, что в свою очередь приводит к усложнению всей конструкции. Два привода будут работать независимо друг от друга. Для синхронной работы ножей в этом случае потребуется синхронизация работы приводов, для этого необходимо ввести дополнительные настройки системы, увеличатся затраты по времени и соответственно простой техники.
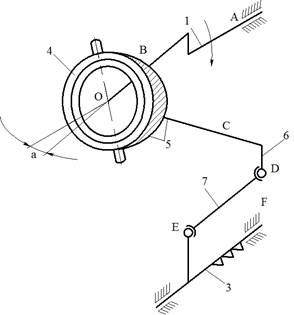
Рисунок 2 - Механизм качающейся шайбы зерноуборочного комбайна
Существует и несколько модификаций приводов на основе механизма качающейся шайбы. Рассмотрим один из таких механизмов (рисунок 3). В его основе лежит механизм качающейся шайбы. На ведущий вал 1 посажена втулка 5 с возможностью осевого перемещения, шарнирно связанная посредством поводка 6 с механизмом качающейся шайбы 2. При вращении ведущего вала 1 его шлицевой участок приводит во вращение и втулку 5, далее посредством поводка 6 и колебателей 3 задаётся возвратно-поступательное движение ножам 4 [22].
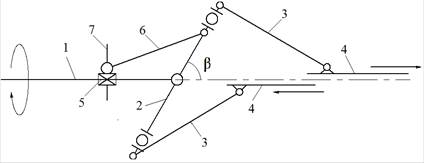
Рисунок 3 - Механизм качающейся шайбы для работы с двумя ножами
Так как в основе данного привода ножей лежит механизм качающейся шайбы, то соответственно сохраняются и все конструктивные и эксплуатационные недостатки приводов данного типа, за исключением того, что теперь стала возможна работа с двумя ножами. При этом конструкция привода была значительно усложнена дополнительными звеньями, что соответственно увеличило массу механизма и нагрузки в шарнирах. А несимметричность конструкции негативно отражается на работе механизма в виде повышенной вибрации и дополнительных динамических нагрузок.
В конструкциях приводов применяются также и схемы планетарных механизмов, которыми в основном комплектуются режущие аппараты системы Schumacher (используются в ряде зарубежных и новых отечественных зерноуборочных комбайнов Vector 410, 420; Acros 530, 540, 560; Torum 740; валковой жатке ЖХТ-18 и других машинах) [5]. На рисунке 4 показана схема планетарного привода ножа, где ведущий вал и водило вращаются против хода часовой стрелки (вид слева на клиноременную передачу), а вал сателлита – по ходу часовой стрелки (вид сверху). Вращательное движение задаётся при помощи ведущего вала, и путём дальнейших преобразований на выходе механизма переходит в возвратно-поступательное [17]. На рисунке 4 обозначенными являются: 1– ведущий вал; 2 – водило H; 3 – вал сателлита; 4 –нож; 5 – сателлит; 6 – неподвижное зубчатое колесо с внутренними зубьями.
Техническим недостатком планетарного типа приводов являются ограниченные эксплуатационно-технические показатели, при повышенной сложности конструкции. В частности, не предусматривается привод двух ножей, что необходимо для увеличения поверхности скашивания. Для установки второго ножа требуется ещё один механизм привода, который существенно увеличит вес конструкции, а также усложнит ее. Также отсутствует возможность регулирования параметров движения ножа. Привод устанавливается в вертикальной плоскости, что вызывает вертикальные смещения ножа при требуемом движении в горизонтальной плоскости, что существенно уменьшает эффективность комбайна.
На отечественных комбайнах "Енисей" и "Нива" в качестве привода ножей применяется шестизвенный пространственный механизм (рисунок 5) [12]. Принцип действия механизма заключается в следующем. Кривошип 1 перемещает шатун 2, который передаёт движение коромыслу 3. Шатун совершает сложное движение в двух плоскостях, поэтому соединение шатуна с коромыслом реализовано посредством шарового шарнира C. Шарниры C и E коромысла совершают колебательное движение относительно неподвижной оси D в плоскости, которая перпендикулярна этой оси. Движения ножа 5 и колебания коромысла также происходят в разных плоскостях, вследствие чего они связаны звеном 4 через шаровые опоры.
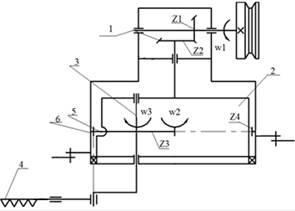
Рисунок 4 - Схема планетарного привода ножа
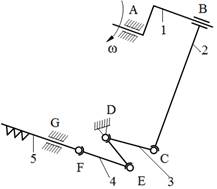
Рисунок 5 - Шестизвенный пространственный механизм
Недостатки данного механизма заключаются в следующем. При воздействии на нож, коромысло сообщает ему колебательные движения, прижимая его к направляющим, тем самым увеличивая трение между ножом и направляющими, и соответственно, увеличивая их износ. Так как между основанием головки ножа и направляющей образуется зазор, это влечёт за собой возникновение ударных нагрузок, что приводит к внеплановым поломкам. При этом механизм является пространственным, что также негативно сказывается на его эксплуатационных характеристиках и надёжности [25]. Следующий привод основан на работе эксцентрикового механизма (рисунок 6). Привод состоит из приводного вала 1, на свободном конце которого размещён кривошип, выполненный в виде пары зубчатых колёс 2 и 3 с одинаковым числом зубьев, находящихся в зацеплении и размещённых в корпусе на осях 5 с постоянным межцентровым расстоянием. Колесо 2 эксцентрично закреплено на приводном валу 1. А колесо 3 при помощи эксцентрично установленной оси 6 соединено с одним из концов шатуна 7. Другой конец шатуна связан зубчато-реечным механизмом, который состоит из двух реек 8 и 9, контактирующих с колесом 10. Колесо 10 установлено в корпусе 11, а рейка 8 соединена с шатуном 7, в свою очередь рейка 9 соединена с подвижным ножом 13 режущего аппарата [10]. Эксцентриковый привод работает следующим образом. Вращение приводного вала 1 передается эксцентрично установленному зубчатому колесу 2, входящему в зацепление с колесом 3. Оба колеса установлены в корпусе на осях 5 с постоянным межцентровым расстоянием, колесо 3 одновременно совершает движение относительно приводного вала 1 и вокруг собственной оси 5. Одна из точек колеса 3, совпадает с эксцентрично расположенной осью 6 и совершает при этом прямолинейное движение.
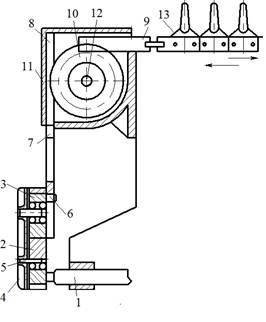
Рисунок 6 - Общий вид эксцентрикового привода режущего аппарата
Это движение передаётся при помощи шатуна 7 на зубчатую рейку 8, входящую в зацепление с зубчатым колесом 10. Рейка, вращаясь, передает исполнительное движение на подвижный нож 13 режущего аппарата [19]. Недостаток привода заключается в использовании зубчато-реечного механизма. Вследствие возникающих сил трения между корпусом 11 и зубчатыми рейками 8 и 9, корпус механизма со временем изнашивается, это приводит к увеличению зазора между рейками 8 и 9, входящими в зацепление с зубчатым колесом 10. Также из-за больших размеров привода установка его на травяную жатку затруднена и требует больших затрат труда и средств.
На рисунке 7 представлен привод двухножевой фронтальной косилки с использованием гибких предварительно напряжённых связей. Под гибкими связями подразумевают ремни, цепи, нити, канаты, которые охватывают два или более звена и устанавливают определённую связь между движениями этих звеньев. Анализ данной схемы указывает о ряде серьёзных недостатков характерных для механизмов подобного типа. К основным недостаткам можно отнести низкую нагрузочную и компенсирующую способности из-за наличия избыточных связей, а так же быстрый и интенсивный износ гибких связей при значительном смещении базовых деталей. Следовательно, конструкция нуждается в очень точном изготовлении базовых деталей кинематической цепи и сборки отдельных узлов привода [3].
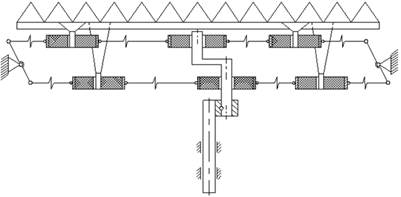
Рисунок 7 - Привод двухножевой фронтальной косилки
Примеры зарубежных разработок механизмов приводов комбайнов
Из зарубежных разработок приводов известна схема планетарного привода представленная на рисунке 8 [25]. В основе работы данного механизма заложен эксцентрик. Эксцентриковый элемент представляет собой круглый или дискообразный элемент и установлен на валу шестерни эксцентрично его оси. Шестерня вала проходит выше эксцентрикового элемента, чтобы оставалось отверстие в верхнем опорном крепеже. Болт резьбовым соединением удерживает верхний подшипник и эксцентричный элемент на валу [10]. Эта модель привода имеет меньше недостатков, чем выше перечисленные, но не менее значимые.
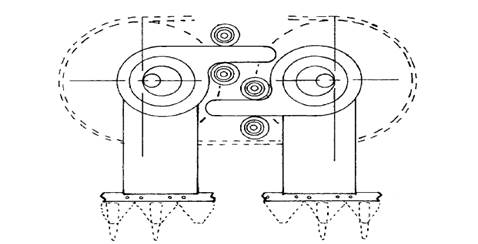
Рисунок 8 - Планетарный привод ножей комбайна
В данном приводе используется два планетарных механизма, соединённых между собой ременной передачей. Сами по себе планетарные механизмы сложны в изготовлении и требуют высокой точности при сборке. Также наличие в механизме привода ременной передачи в целом снижает общую надёжность механизма. На рисунке 9 изображена ещё одна схема привода ножей, используемая на зарубежных машинах сельскохозяйственной техники [4]. Данный привод состоит из корпуса 1, стойки 2, двух шестерен 3, вращающихся вокруг центров вращения 4, двух входных отверстий 5, линейного подшипника 6, сквозных отверстий 7 и уплотнителей 8.
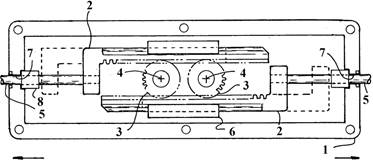
Рисунок 9 - Схема двухножевого привода
Привод состоит из двух шестерен и шестерни расположенной в центре жатки комбайна, задающей движение. Одна боковая стойка соединена с ножом и приводится в движение с помощью шестерни. Аналогично устроена и другая стойка. При вращении шестерни правая стойка будет двигаться вправо, соответственно левая стойка двигается влево, при этом обеспечивая движение ножей в противоположных направлениях. Из недостатков рассмотренного механизма можно отметить сложность конструкции. В устройстве использованы линейные подшипники, это снижает надёжность и долговечность привода в целом. Недостатки этого привода заключаются в необходимости обеспечения высокой точности при сборке и сложности в обслуживании.
ЗАКЛЮЧЕНИЕ
В работе были проанализированы модели приводов, используемые на современных российских и иностранных зерноуборочных машинах. Изучены конструктивные недостатки механизмов приводов с целью модернизации конструкций для дальнейшего их применения на комбайнах. Такая модернизация позволит улучшить эксплуатационно-технологические показатели зерноуборочных машин и повысить эффективность их функционирования, что является в итоге важным результатом для всей сельскохозяйственной отрасли. Из проведенного анализа следует, что повысить эффективность работы привода можно одновременным приведением в движение двух ножей и расположением самого механизма привода в горизонтальной плоскости движения ножей. Для облегчения массы конструкции необходимо использовать минимально возможное количество звеньев, а также для повышения надёжности необходимо избавиться от гибких связей, таких, как цепные и ременные передачи. Работа привода в горизонтальной плоскости позволит исключить вертикальные смещения ножа во время работы и снизить нагрузки в звеньях и кинематических парах. Очень важной задачей является создание уравновешенного механизма для максимального уменьшения вибрации машины и преждевременного износа деталей. Подводя итог проведённому исследованию, сделаем вывод о том, что данный узел зерноуборочной машины является одним из ключевых и требует проведения дальнейших исследований и обязательных модернизаций.
Библиографическая ссылка
Киселёв С.В. АНАЛИЗ СТРУКТУРЫ И ТЕХНИЧЕСКИХ ХАРАКТЕРИСТИК СУЩЕСТВУЮЩИХ МЕХАНИЗМОВ ПРИВОДОВ НОЖЕЙ ЗЕРНОУБОРОЧНЫХ КОМБАЙНОВ // Международный студенческий научный вестник. – 2017. – № 3. ;URL: https://eduherald.ru/ru/article/view?id=17225 (дата обращения: 20.04.2024).