

Негативная обстановка с аварийностью в стране во многом влияет на показатели аварийности в Вооруженных Силах Российской Федерации и во внутренних войсках МВД России. При этом анализ ДТП по способу движения машин при их совершении показывает, что в 2013 году 58 % от всего количества ДТП допущено при движении машин в колонне (в 2012 году – 35 %). на лицо динамика роста аварийности движения в колоннах.
Одним из очевидных путей повышения безопасности движения военной автомобильной техники (ВАТ) является ее оснащение бортовыми автоматизированными системами управления движением вообще и, в частности, системами предотвращения столкновения [1].
Анализ таких систем показывает, что большинство их имеют лазерные датчики. для лазерного датчика существуют ограничения, которые характерны для всех систем с использованием оптических средств. Иными словами, чувствительность прибора может быть снижена по причине тумана, снега или проливного дождя. В связи с этим рекомендуется содержать место установки датчика в чистоте и своевременно удалять грязь, лед и снег. Это не совсем приемлемо для специфических условий эксплуатации ВАТ.
В этой связи необходима разработка и адаптация для ВАТ радиолокационных систем предотвращения столкновений автомобилей в колонне, действия которых основаны не только на предупреждении водителя о предшествующем столкновении, но и автоматизированном воздействии на механизмы управления автомобиля.
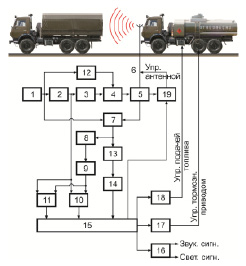
Функциональная схема предлагаемой системы предотвращения столкновений транспортных средств в колонне представлена на рис. 1.
Система содержит генератор непрерывных колебаний 1, модулятор 2, первый усилитель мощности 3, сумматор 4, циркулятор 5, антенну 6, смеситель 7, преобразователь частоты 8, детектор 9, регистратор дальности 10, первый регистратор скорости 11, второй усилитель мощности 12, фильтр доплеровских частот 13, второй регистратор скорости 14, вычислитель опасного расстояния по дальности, путевой скорости и скорости сближения 15, первую 16, вторую 17 и третью 18 исполнительные схемы, схему 19 управления положением антенны.
 35
35
Рис. 1. Функциональная схема системы предотвращения столкновений АТ в колонне
Система работает следующим образом. Генератор 1 формирует непрерывные колебания радиочастоты, поступающие одновременно: на модулятор 2, в котором формируются радиоимпульсы, усиленные в первом усилителе мощности 3, поступающие на сумматор 4, а с него через циркулятор 5 излучаются через антенну 6 в пространство; на первый гетеродинный вход смесителя 7, на второй вход которого поступает через антенну 6 и циркулятор 5 радиосигнал, отраженный от препятствия; на вход второго усилителя мощности 12, выходной радиосигнал которого через сумматор 4, циркулятор 5 и антенну 6 также излучается в пространство.
Таким образом, антенной 6 одновременно излучаются в пространство импульсный и непрерывный радиосигнал. Сигнал на выходе смесителя 7 несет информацию о дальности до препятствия и путевой скорости, если луч диаграммы направленности антенны 6 облучает препятствие, находящееся перед автомобилем, а боковой лепесток антенного луча соприкасается с земной поверхностью.
Измерение дальности до препятствия и скорости сближения с ним после смесителя 7 осуществляется преобразователем частоты 8, с выхода которого сигнал, преобразуясь в детекторе 9, поступает на первые входы регистратора дальности 10 и первого регистратора скорости 11, на вторые входы которых поступают радиоимпульсы, сформированные в модуляторе 2.
Первый регистратор скорости 11 выдает информацию на третий вход вычислителя опасного расстояния по дальности, путевой скорости и скорости сближения 15, в котором скорость сближения автомобиля с препятствием вычисляется как скорость изменения приращения дальности по времени, так что
 (1)
(1)
где dR – приращение дальности, м; dt – приращение времени, с.
С регистратора 10 сигнал поступает на второй вход вычислителя 15 опасного расстояния по дальности, путевой скорости и скорости сближения.
Оценка путевой скорости осуществляется выделением сигнала, сформированного после смесителя 7, затем фильтром доплеровских частот 13, при помощи второго регистратора скорости 14.
Численно величина путевой скорости движения автомобиля прямо пропорциональна доплеровской частоте и при определенной длине волны радиосигнала, и угле облучения антенной дорожного покрытия находится по зависимости
 (2)
(2)
где vaм – путевая скорость движения автомобиля, м/с; Fд – круговая частота с учетом эффекта Доплера, с-1; λ – длина волны радиосигнала, м; α – угол облучения антенной дорожного покрытия, град.
Таким образом, с выхода второго регистратора скорости 14 сигнал поступает на первый вход вычислителя 15 опасного расстояния по дальности, путевой скорости и скорости сближения, на второй его вход сигнал поступает с выхода регистратора скорости 10 и на третий его вход сигнал поступает с выхода первого регистратора скорости 11, а с выхода вычислителя 15 подается команда на исполнительную схему, например звуковую и световую индикацию.
Вычислитель 15 опасного расстояния по дальности, путевой скорости и скорости сближения производит вычисления и на его выходе появляется сигнал-команда при достижении опасного расстояния Rтop, т.е. между автомобилем и впереди находящимся препятствием (движущимся или неподвижным), при этом производится анализ трех текущих значений:
– путевой скорости движения автомобиля (относительно опорной поверхности) – vaм;
– скорости сближения с препятствием vсбл;
– текущей дальности до препятствия Rтек.
Критические значения этих величин оцениваются при ситуациях:
– автомобиль движется в сторону неподвижного или встречно движущегося препятствия;
– автомобиль движется в потоке, в котором все транспортные средства движутся в одну сторону с одинаковой скоростью;
– автомобиль движется в потоке, в котором часть транспортных средств движется в противоположную сторону.
При движении автомобиля в направлении на неподвижное препятствие или на препятствие движущееся встречно расчет опасного расстояния производится по классической формуле:
 (3)
(3)
где Rтop1 – величина опасного расстояния, м; t1 – время срабатывания тормозного привода, с; t2 – время нарастания ускорения, с; φ – коэффициент сцепления шин с опорной поверхностью; i – величина уклона дороги; Кэ – коэффициент эксплуатационных условий торможения с2/м.
При использовании для расчетов вычислительной техники коэффициенты, характеризующие состояние тормозной системы автомобиля и дорожного покрытия, могут устанавливаться программно.
При движении автомобиля в потоке, в котором все транспортные средства движутся в одну сторону, скорость относительного сближения двух движущихся транспортных средств может быть равна нулю (vсбл = 0), но расстояние Rтор2, на котором необходимо выдать команду об опасном расстоянии, должно быть не ниже значения ΔR, которое зависит как от величин путевой скорости автомобиля vaм, так и от времени реакции водителя автомобиля:
ΔR = vaмtвод. (4)
где tвод – время реакции водителя, с.
Тогда общий тормозной путь может быть найден по формуле:
Rтор2 = Rтор1 + ΔR. (5)
Следовательно, вычислитель 15 опасного расстояния по дальности, путевой скорости и скорости сближения выдает исполнительную команду по результатам вычислений совместных величин: текущей дальности до препятствия Rтек, скорости сближения с препятствием vсбл и путевой скорости автомобиля vaм только в случае достижения критического состояния этих величин, при которых возможно опасное столкновение как с подвижным, так и неподвижным препятствием.
Применение схемы 19 управления положением антенны позволяет изменить угол, под которым производится излучение при наличии встречно движущегося транспортного средства, снабженного подобным устройством. Это позволяет снизить взаимные помехи, создаваемые радарами.
В случае, если водитель не успел среагировать на предупреждающий звуковой и световой сигнал, вырабатываемый схемой 16, что идентифицируется в вычислителе 15 по определяемым величинам текущей дальности до препятствия Rтек, скорости сближения с препятствием vсбл и путевой скорости автомобиля vaм, когда значение этих величин после достижения критических состояний, при которых возможно столкновение как с подвижным, так и неподвижным препятствием по истечении 0,8 секунд (время реакции среднестатистического водителя) не изменяется до безопасного состояния, тогда схема 17 автоматически воздействует на орган управления подачей топлива, переводя автомобиль в режим торможения двигателем, а схема 18 одновременно – на орган управления давлением в тормозном приводе, переводя автомобиль в режим торможения рабочей тормозной системой.
Как только значения текущей дальности до препятствия Rтек, скорости сближения с препятствием vсбл и путевой скорости автомобиля vaм, определяемые вычислителем 15, достигнут безопасного состояния, подача исполнительной команды с вычислителя 15 на исполнительные схемы 16, 17 и 18 прекращается.
В результате достигается снижение вероятности столкновения транспортного средства при интенсивном сближении с препятствием за счет свето-звуковой индикации, предупреждающей о достижении опасной дистанции и непосредственного автоматического воздействия на подачу топлива и тормозную систему транспортного средства при создании аварийной ситуации.
Библиографическая ссылка
Ляхова В.В. АВТОМАТИЗИРОВАННАЯ СИСТЕМА ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ДВИЖЕНИЯ ВОЕННОЙ АВТОМОБИЛЬНОЙ ТЕХНИКИ В КОЛОННЕ // Международный студенческий научный вестник. – 2015. – № 3-1. ;URL: https://eduherald.ru/ru/article/view?id=12022 (дата обращения: 27.04.2024).